Frame v2.1 upper leg's servo horn, linked leg bridge, and bridge bearing press fit together.
Video: frame v2.1 first tests
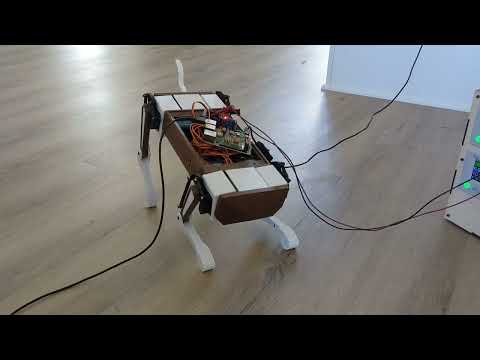
Video: Sydney meets Zuko
Status
Development.
V2.2 Frame is being tested and is nearly ready for replication
General
Zuko uses the ROS2 framework for communication, launching, and 3rd party addons. Zuko uses a Rasberry Pi 4 with a custom expansion board for motor and peripheral control via a Playstation 4 controller.
Current Major Tasks
Complete ROS2 tasks - in progress
Fab/test expansion-board PCB
Update BOM
Create PCB BOM
Upload STL's
Create print time/weight sheet
Create how to documentation for end user
ROS2 Workspace
ROS2 source code is contained the quad_ws directory.
My contributions
Frame redesign using larger servos, providing more space for electronics, rework of the leg/hip system, and addition of aesthetic features (tail, etc).
Migration of source code from ROS1 to ROS2 (Robot Operating System) frameworks.
Inverse kinematics for a linked leg system for OpenQuadruped / Spot Mini Mini based quadrupeds.
Parameterized duplicated hard-coded values.
Created servo calibration script for quicker calibration and servo support.-
A more feature rich motor and peripheral expansion board using a Teensy 4.0 supporting aux servos, foot sensors, NeoPixls, etc.
8x 18650 user accessable battery holder with onboard BMS (battery management system).