This project enables PWM on the GPIO pins you request of a Raspberry Pi. The technique used is extremely efficient: does not use the CPU and gives very stable pulses.
Pi-blaster project is based on the excellent work of Richard Hirst for ServoBlaster.
Thanks to Boyuan Yang, we now have a Raspbian package for pi-blaster. You can install it with apt-get:
sudo apt-get install pi-blaster
Note that the Debian package might be slightly out of date. For the most recent version, compile from source or make your own Debian package (see below).
Thanks to Patrick Wozniak, you can easily install pi-blaster on archlinux with:
yaourt -S pi-blaster-git
And activate the systemd-service with:
sudo systemctl enable pi-blaster
The Debian package relies on systemd which means you must have Raspbian 8 or
later (aka "Jessie"). Run cat /etc/debian_version) to check what version
you are currently running.
Install the debian tools required to compile and prepare the package:
sudo apt-get install debhelper dh-autoreconf dh-systemd dpkg-dev \
init-system-helpers autoconf
And build the package:
dpkg-buildpackage -us -uc -i sudo dpkg -i ../pi-blaster*.deb
The build environment is based on Autotools to allow for compilation on the Raspberry Pi, or cross-compilation.
You may need to install autoconf to build. On Raspbian and other Debian based
systems this can be achieved with:
sudo apt-get install autoconf
Building is extremely simple:
./autogen.sh
./configure
make
To start pi-blaster and have it relaunched automatically on every reboot:
sudo make install
Or to start pi-blaster manually run:
sudo ./pi-blaster
And to uninstall, simply run:
sudo make uninstall
This will stop pi-blaster and prevent it from starting automatically on the next reboot.
pi-blaster creates a special file (FIFO) in /dev/pi-blaster. Any application
on your Raspberry Pi can write to it (this means that only pi-blaster needs to
be root, your application can run as a normal user).
Important: when using pi-blaster, the GPIO pins you send to it are configured as output.
To set the value of a PIN, you write a command to /dev/pi-blaster in the form
<GPIOPinName>=<value> where <value> must be a number between 0 and 1
(included).
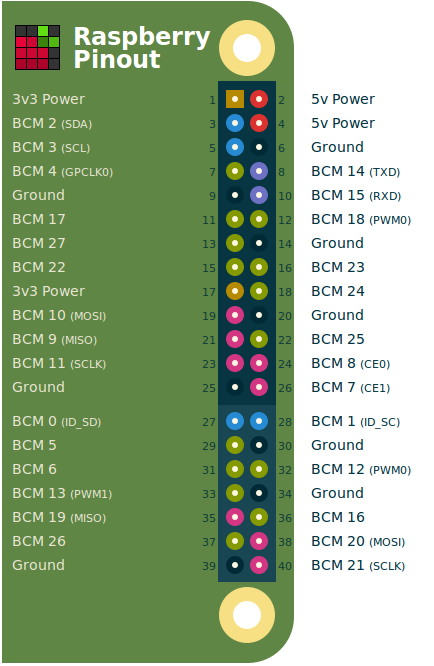
You must use the GPIO number (BCM xx in the diagram below).
Examples:
-
To completely turn on GPIO pin 17:
echo "17=1" > /dev/pi-blaster
-
To set GPIO pin 17 to a PWM of 20%
echo "17=0.2" > /dev/pi-blaster
-
To turn off GPIO pin 17:
echo "17=0" > /dev/pi-blaster
-
To release a pin so it can be used as digital GPIO or an input:
echo "release 17" > /dev/pi-blaster
NodeJS users can use pi-blaster.js.
A C# example was contributed by Vili Volcini. It is available on this stackoverflow thread.
On startup, pi-blaster gives you the frequency of the PWM, the number of steps that you can control, the maximum and the minimum period of a pulse.
sudo ./pi-blaster
Using hardware: PWM
Number of channels: 8
PWM frequency: 100 Hz
PWM steps: 1000
Maximum period (100 %): 10000us
Minimum period (0.100%): 10us
You can adjust those by changing a few defines at the top of the source code:
NUM_SAMPLES: The number of stepsSAMPLE_US: The time of one step (minimum period)
If you do not need a resolution of 1000 steps (approximately equivalent to a 10 bit DAC), then you can reduce the number of samples or increase the duration of the steps.
Richard Hirst who wrote the original code recommended not going below 2us for
SAMPLE_US.
To override the default list of supported GPIO pins and specify fewer (or more) you can specify a comma separated list of GPIO numbers. This is also the default list:
--gpio 4,17,18,27,21,22,23,24,25
To use the BCM2835's PCM peripheral instead of its PWM peripheral to time the DMA transfers, pass the option:
--pcm
This is useful if you are already using the chip's PWM peripheral, for example for audio output.
To invert the pulse (off = pin HIGH, pulse = pin LOW), use:
--invert
This can be useful for common anode LEDs or other devices that expect an active-low signal.
To keep pi-blaster running in the foreground without running as a daemon use:
-D
To view help or version information, use:
--help
--version
Pins being used by pi-blaster will be configured as outputs. Do not plug something on an input or you might destroy it!
This daemon uses the hardware PWM generator of the raspberry pi to get precise
timings. This might interfere with your sound card output. There is
experimental support for a PCM time-source. If you are interested, I suggest you
look at Richard Hirst original project (ServoBlaster) and try the --pcm
option.
This library was developed for TBideas high power LED driver. You can read more about this project on our blog.
- Richard Hirst for ServoBlaster
- Thomas Sarlandie (https://github.com/sarfata)
- Michael Vitousek (https://github.com/mvitousek/pi-blaster)
- Pete Nelson (https://github.com/petiepooo)
- Edgar Siva (https://github.com/edgarsilva)
- Alex Lennon (https://github.com/ajlennon)
- Lara Maia (https://github.com/LaraCraft304)
- Pattrick Hüper (https://github.com/phueper)
- Boyuan Yang (https://github.com/hosiet)
- penfold42 (https://github.com/penfold42)
The best way to contribute is to write code for the features you would like to see and to make a pull-requests.
Released under The MIT License.
Note: This project was initially released by Richard Hist under the GPL v3 License. Richard gave me explicit permission to distribute this derivative work under the MIT License.
Copyright (c) 2013 Thomas Sarlandie - Richard Hirst
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to
deal in the Software without restriction, including without limitation the
rights to use, copy, modify, merge, publish, distribute, sublicense, and/or
sell copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS
IN THE SOFTWARE.