A Pytorch implementation of the PointNet network.
Reference: "PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation", Qi et al
Install the dependencies using Conda:
conda create --name pytorch_pointnet --file spec-file.txt
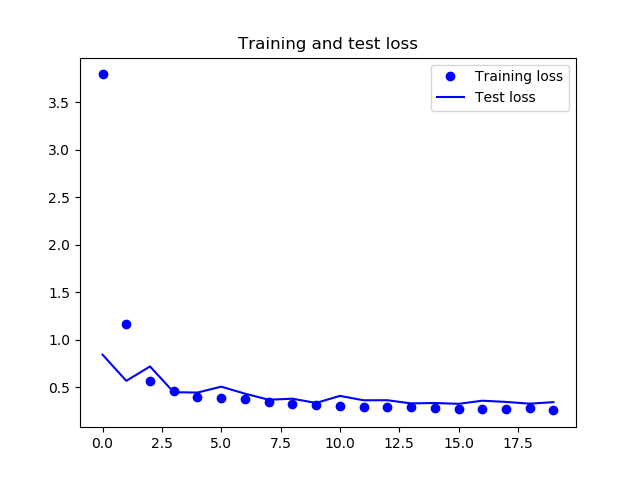
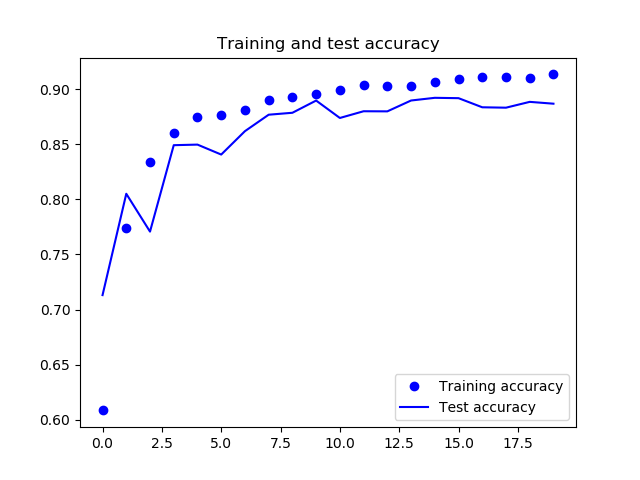
shapenet: The dataset can be downloaded here. For this dataset, classification and segmentation (part segmentation) tasks are available.-
Classification: Pretrained model
-
Segmentation: Pretrained model
TODO: change the metric to mIoU for segmentation
-
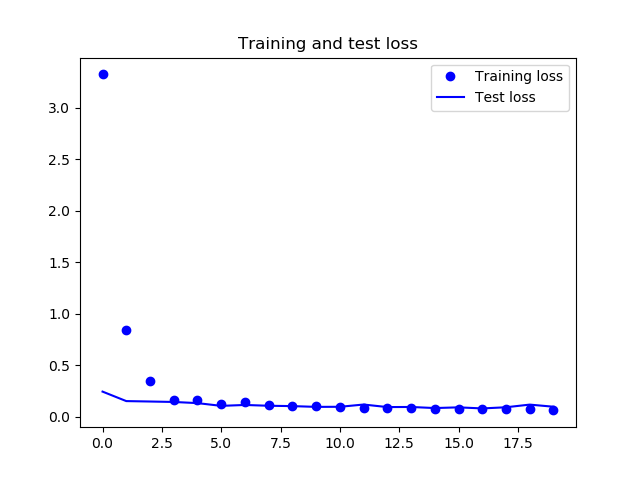
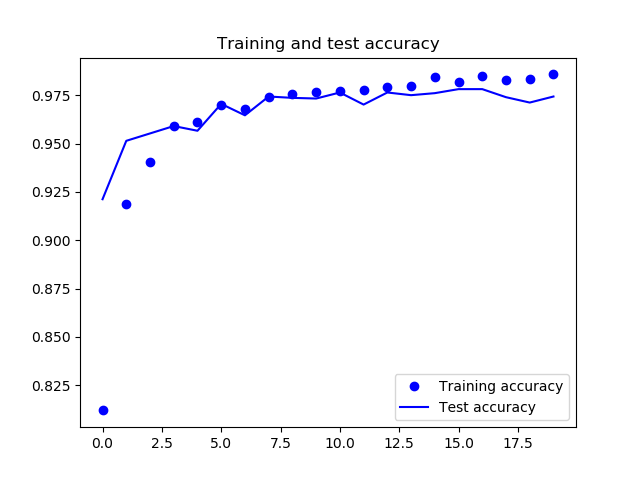
mnist: If not found, the dataset will be downloaded automatically. Only the classification task is avialable.-
Classification: with only 50 points per cloud, Pretrained model
-






Use the following script for training
python train.py dataset dataset_folder task output_folder
--number_of_points 2500
--batch_size 32
--epochs 50
--learning_rate 0.001
--number_of_workers 4
--model_checkpoint
where:
dataset: is one of the available datasets (e.g.shapenet)dataset_folder: is the path to the root dataset foldertask: is eitherclassificationorsegmentationoutput_folder: is the output_folder path where the training logs and model checkpoints will be storednumber_of_points: is the amount of points per cloudbatch_size: is the batch sizeepochs: is the number of training epochslearning_rate: is the optimizer learning ratenumber_of_workers: is the number of workers used by the data loadermodel_checkpoint: is the path to a checkpoint that is loaded before the training begins.
Use the following script for inference:
python infer.py dataset model_checkpoint point_cloud_file task
where:
dataset: is one of the available datasets (e.g.shapenet)model_checkpoint: is the path to a checkpoint that is loaded before the inference begins.point_cloud_file: is the path to the point cloud file to run the inference on.task: is eitherclassificationorsegmentation
This will also output a 3d visualization of the point cloud.