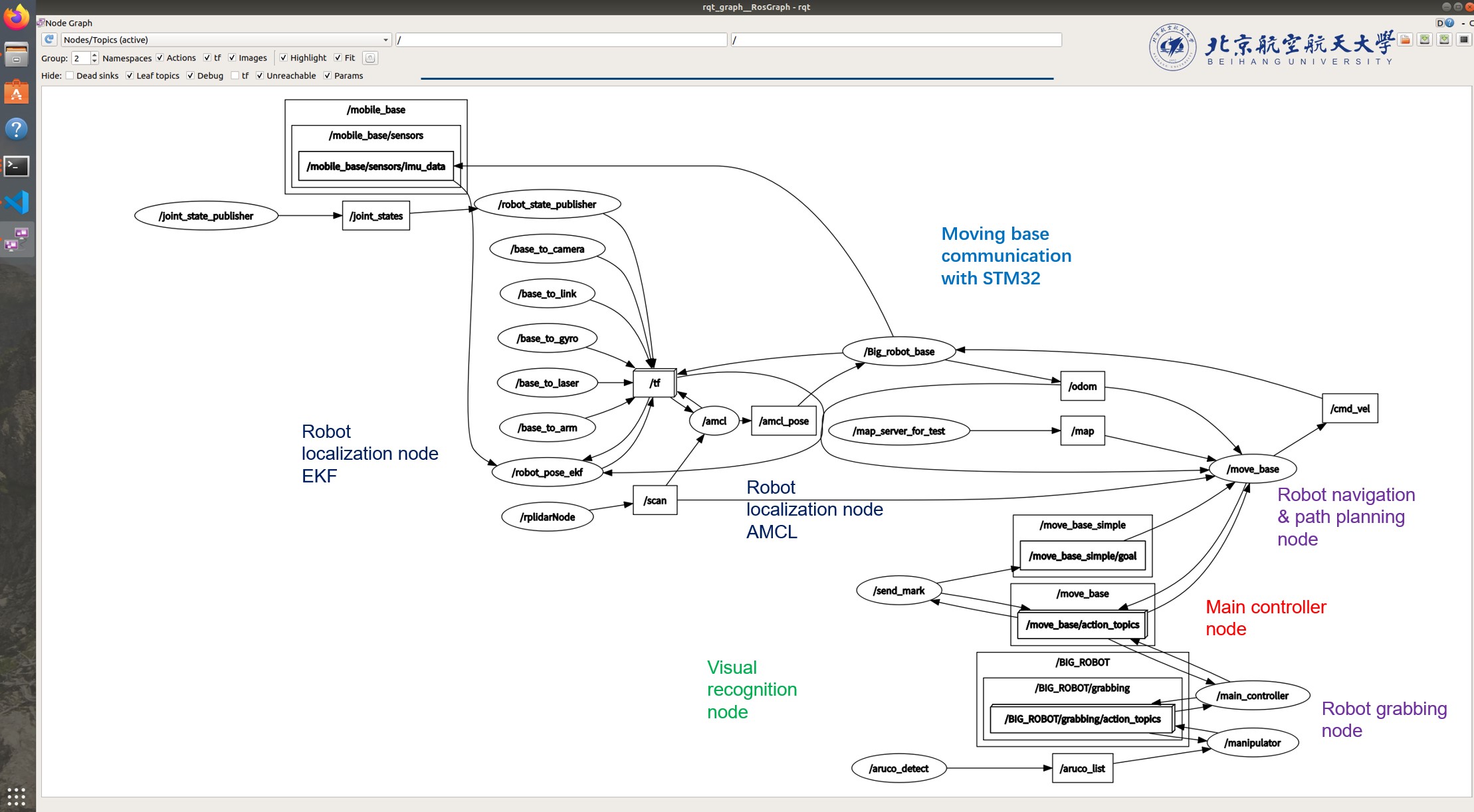
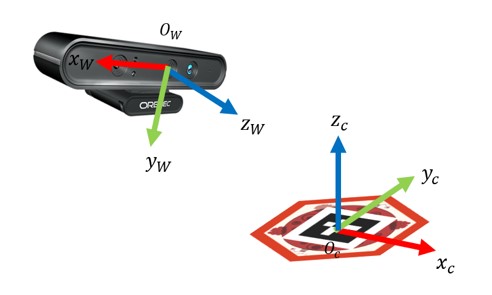
- pkg capstone_manipulator/ & aruco_detect/: a grabbing system based on QR code detection
- pkg main_controller/: define working flows of competition, using ROS::ACTION to define and achieve manipulating and moving tasks
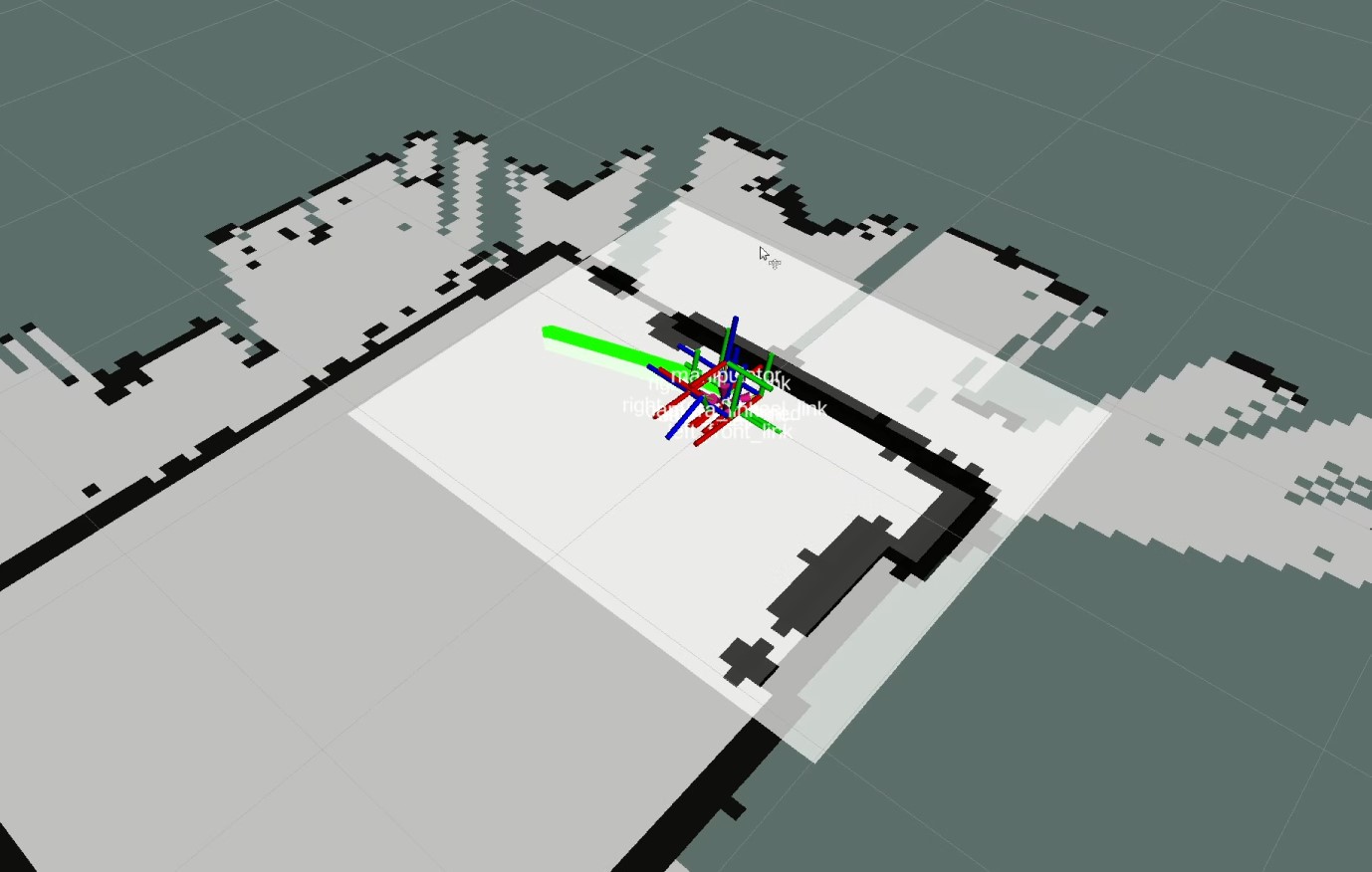
- deployed Extended kalman filter localization, AMCL particle localization on this robot.
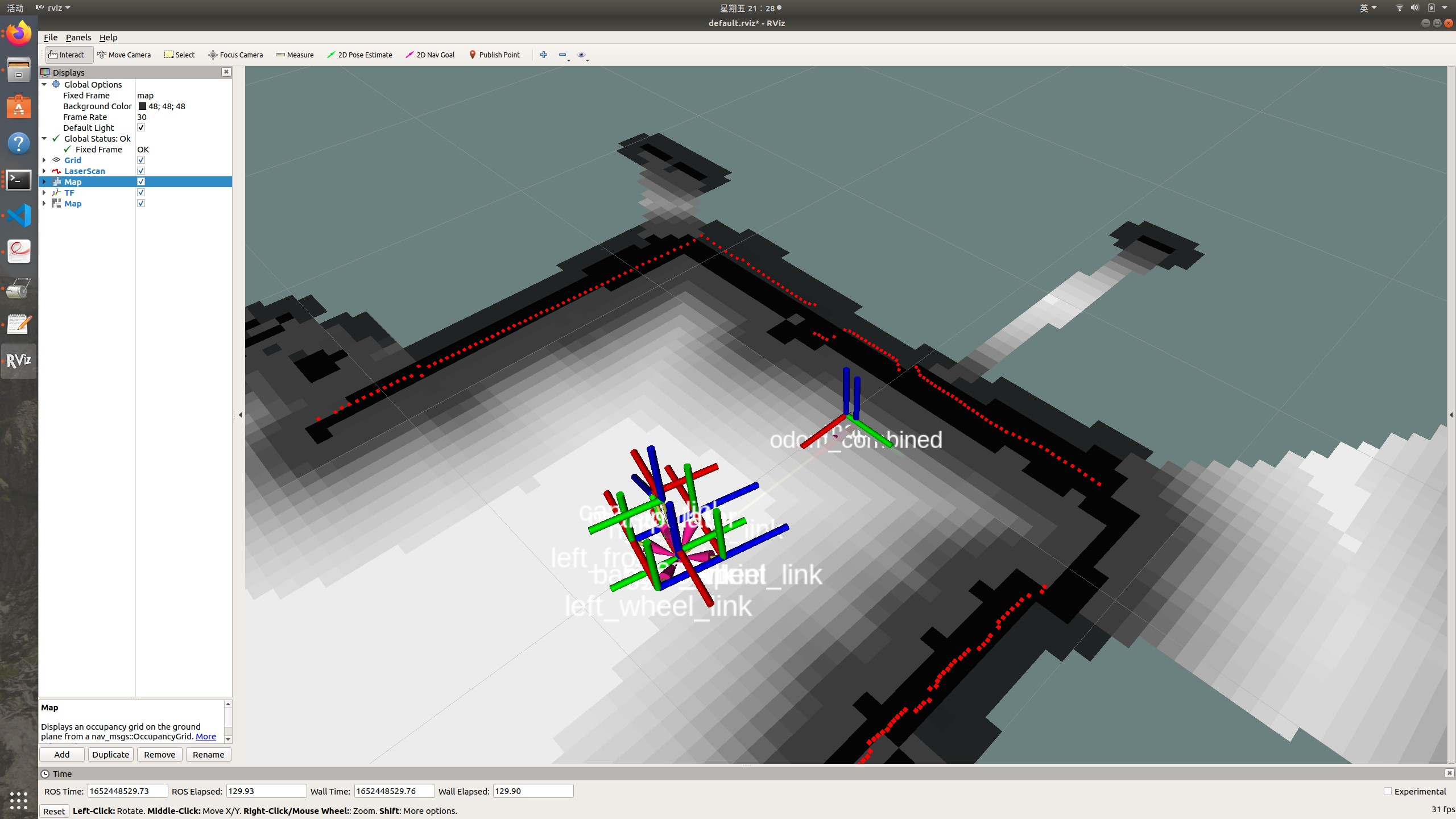
- deployed Dijkstra (global planner) and TEB(local planner) algorthim to plan trajectory.
- Overall control system design