Motion profile generator
Matlab and cpp (Arduino specific) libraries are available. It should be relatively easy to port the cpp version to other platforms.
Features
-
On the fly profile generation
-
Supports Trapezoidal and Constant motion profiles
Usage
#include "MotionProfile.h"
/**
* Initialization
*
* @param int aVelocityMax maximum velocity (units/s)
* @param int aAccelerationMax maximum acceleration (units/s^2)
* @param short aMethod method of profile generation (1 = trapezoidal)
* @param int aSampleTime sample time (ms)
*/
MotionProfile trapezoidalProfile = new MotionProfile(200, 100, 1, 10);
/**
* Usage
*/
// Update setpoint for profile calculation and retrieve calculated setpoint
float finalSetpoint = 1000;
float setpoint = trapezoidalProfile->update(finalSetpoint)
// Check if profile is finished
if (trapezoidalProfile->getFinished()) {};
// Reset internal state
trapezoidalProfile->reset();Example graphs
Trapezoidal motion profile
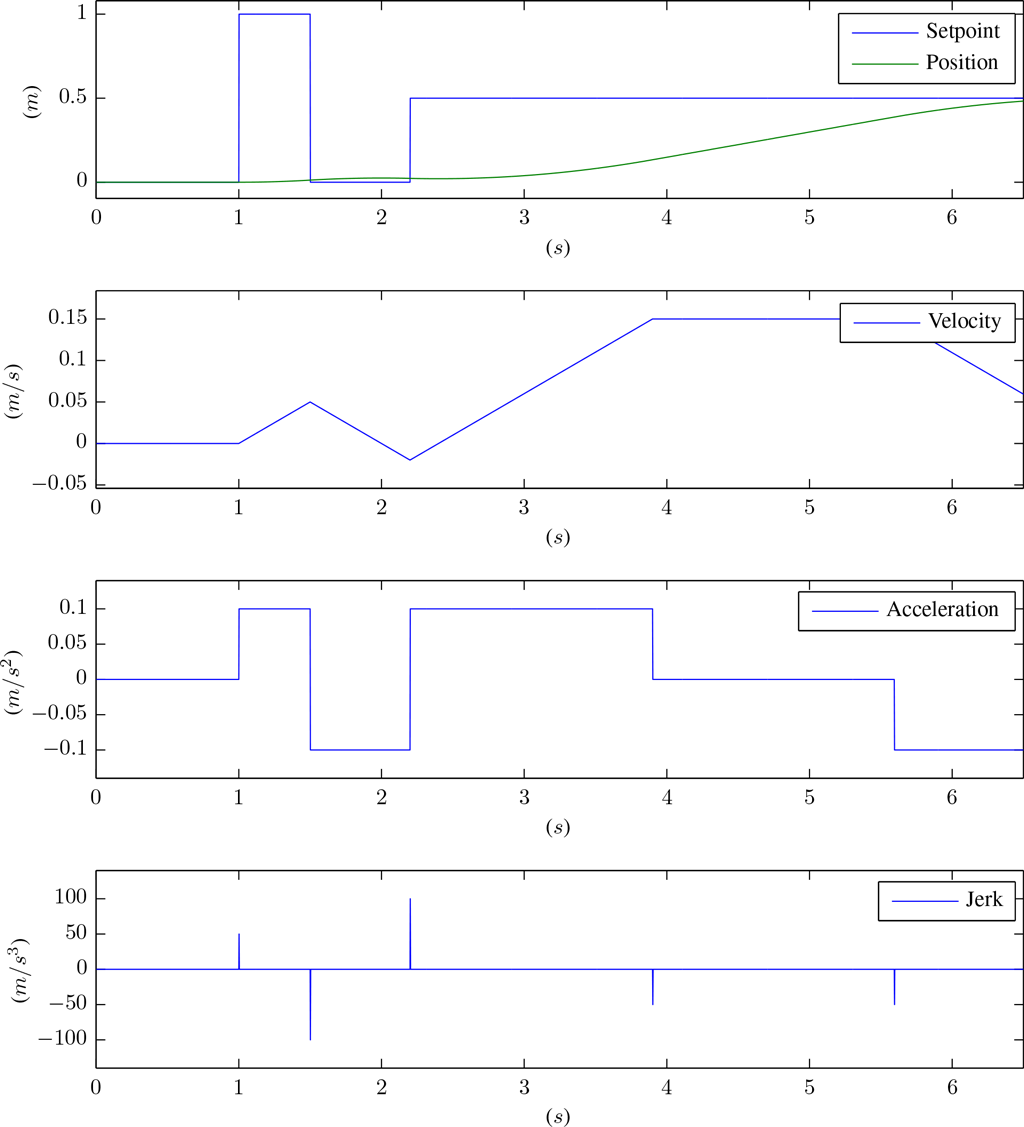 Limit velocity at 0.15 units/s and acceleration at 0.1 units/s^2.
Constant motion profile
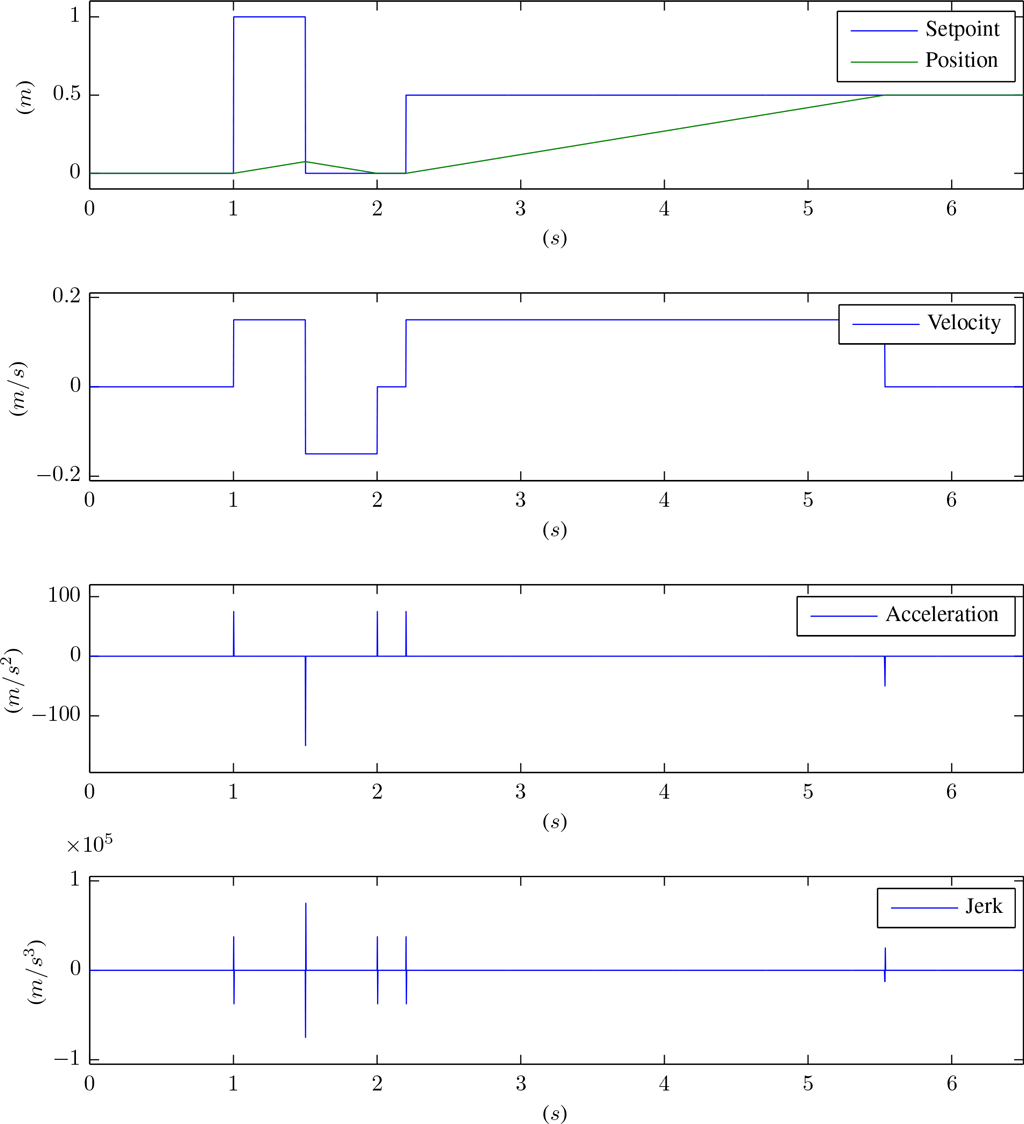 Limit velocity at 0.15 units/s.
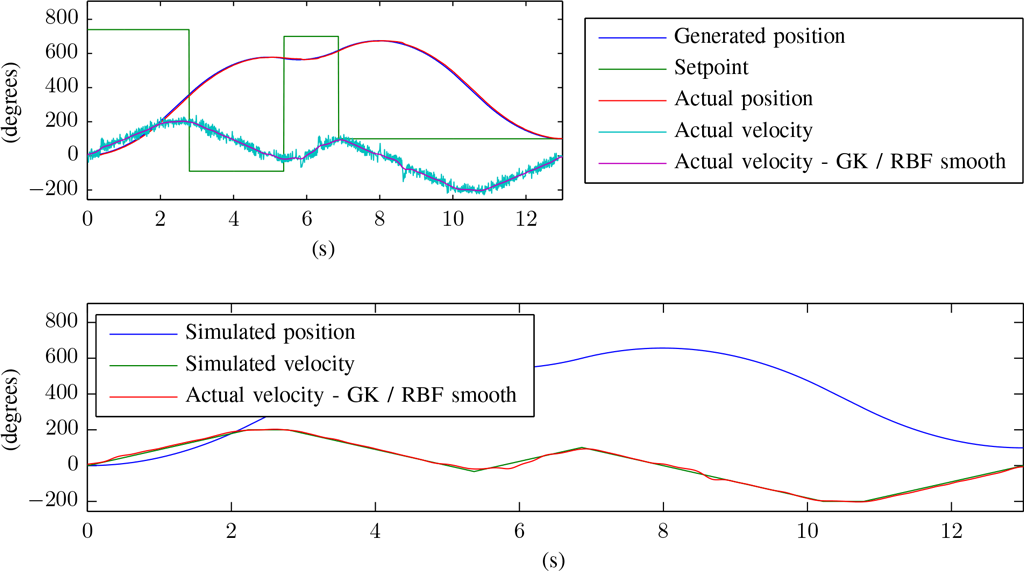
Usage of generator in an experiment
Author
This library has been developed by [Wilbert van de Ridder](http://www.github.com/WRidder) as part of a BSc assignment at the [University of Twente](http://www.utwente.nl).