GMS是一个分布式的消息系统,支持集群和多副本,支持可靠的消息传递。
- 支持集群架构,容易做横向扩展.
- 支持多副本. 多副本之间保持强一致性.
- 使用etcd保存集群数据和集群控制器选举.
- 客户端和服务器之间使用二进制协议通信.
- 客户端发送消息时可以自由选择可靠性等级.
- 客户端发送消息时使用writev系统调用,相比write或send可以将多个数据包为一个做到减少延迟,还能减少write或send系统调用的开销。
- 创建topic时可以选择topic的可靠性级别,做到根据使用场景灵活调整.
- 使用内存映射文件,在读取和写入文件时获取更高性能。特别是在读取时,使用内存映射文件加上sendfile系统调用,可以节省一次从用户态到内核态的系统调用和数据拷贝开销。
- topic: 消息服务器中某个主题.
- 分区和副本:一个topic可以在物理上分为n个分区,所有分区功能相同。每个分区也可以用n个副本,n个副本中有一个是leader副本,其他是follower副本。follower副本向leader副本同步数据。
- log和segment: 分区在磁盘上表现为n个segment,每个segment是一个log文件和index文件。index文件将通过内存映射文件的方式载入,它提供了查找log文件的索引。log和index文件都是固定大小。只有写入消息的segment是以读写方式打开,其他的segment是以只读方式打开。
- Controller: 整个集群的控制器,只会存在一个,当前Controller离线时其他节点会尝试注册成为新的Controller。负责集群内的分区创建、副本选举等功能。
- ISR: In Sync Replica的缩写,指的是多个follower副本中和leader同步的副本列表。处于同步状态的要求是: 10秒中内获取过数据,并且从开始获取到返回响应的时间不超过200毫秒。发送消息时,producer可以根据ACK参数指定需要同步的副本数量,待足够数量的副本同步了此消息后,server才返回完成状态给producer。
- HW: 高水位,指的是producer发送消息给server后,server将这个消息写入到磁盘,offset增加。然后server等待所有follower都同步了这个offset以后,在内存中更新这个分区的HW,leader将HW写入到etcd。下次leader给follower返回数据时会带上当前分区的HW,follower收到后,也会写入到内存和etcd. 最后当consumer在leader副本上获取数据时,会将请求的offset和当前的HW对比,小于等于HW的数据才是可靠的。
- ACK: producer发送消息时,可以在参数中指定ACK,代表producer希望这个消息获得怎么样的确认。ACK为0是不确认,producer发送消息给server后不用等待server的响应。ACK为1是只用等待leader副本一个节点的响应即可。如果ACK是-1, 且leader维护的ISR列表的数量大于全局ISR或者分区设置的ISR,则以全局ISR或者分区ISR参数作为需要等待同步的数量;如果leader维护的ISR列表的数量小于全局ISR或者分区设置的ISR,则以当前ISR列表的数量为准。所以默认最少要等待leader自己写入到磁盘,客户端才能认为消息写入成功。


节点启动的第一件事就是初始化数据目录,类似与/data/mytopic/mytopic-0/这样的3级目录。第一层是最上层的数据目录,第二层是topic的名称,第三层是分区的序号。一个分区目录下不会只有一个消息文件,因为那样会变得很大,载入内存和操纵它都会很麻烦。所以将数据组织为多个segment组成,每个segment分为一个log文件和一个index文件。log文件负责存储真正的消息, index文件负责记录消息的索引。目录结构如下图:

文件名代表了当前log或index文件保存的消息的起始offset,长度是64位。consumer读取消息时,会在内存中将排序好的文件名列表和consumer请求的offset做二分查找,找到对应的文件读取。
多个segment之中,offset最大的那个segment是active segment,它是以读写方式打开,其他segment以只读方式打开。在使用所有segment之前都使用内存映射方式打开文件,但是对于active segment,除了使用内存映射文件打开,还使用了syscall.MAP_POPULATE这个flag值传递给mmap系统调用,这个flag的作用是提前做预取,即第一将文件的所有内容从磁盘读取到物理内存页面作为cache,第二为进程建立好页表,这样不论后续的读取还是写入都会极大的提高速度。 (使用内存映射的方式写入,需要进程的页表中存在文件的映射,所以还是需要从磁盘读取文件内容到物理内存,这点不同与write系统调用,它是直接通过内核文件系统的write函数写入) 还有一种方式是通过syscall.Madvice(),传递syscall.MADV_SEQUENTIAL|syscall.MADV_WILLNEEDflag给这个函数,告诉内核提前做预读,但是这样要看内核的预读策略,而且不会读取文件的所有内容,和普通的read调用效果差不多。
在etcd的/brokers/ids/xxx注册lease机制的key,保存当前节点的信息:
{
"ip_address":"127.0.0.1",
"port":50051,
"rpc_port":50052,
"node_id":"node-0",
"start_time":1557046846
}lease节点不同于普通的key,注册成功后如果在指定时间不续约,则lease节点会被删除。这里需要启动一个goroutine定期续约。
在/controller-election/目录下注册,并尝试成为controler。每个节点都会在该目录下成功创建key, 但只有当前节点观察到key的revision是最小的时候,才会认为自己成为了controller,否则会阻塞并等待。这样就带来了一个好处,这种形式类似与FIFO,最先注册的节点就会最早成为controller,如果观察到当前创建key的revision是最小的,则认为自己是controller.
具体的过程是这样的,节点首先在/controller-election/key下注册key, key是当前session的lease id. 注册key采用的是etcd事务的方式,类似与if-then-else。
事务首先判断key的createRevision是否为0, 为0则创建key并写入value,value可以是任意值。
创建完毕key后,获取创建时的revision,然后将revision-1作为一个新的值,调用函数etcdv3/concurrency/key.go中的函数waitDeletes。
这个函数不停的循环Get是否有比当前revision更小的key, 如果有则watch这个key,等到DELETE事件发生返回nil,在下一个循环中继续Get是否有比当前revision更小的key,
如果没有则函数waitDeletes返回,当前节点成为controller. 否则会阻塞在watch函数上。代码如下:
// waitDeletes efficiently waits until all keys matching the prefix and no greater
// than the create revision.
func waitDeletes(ctx context.Context, client *v3.Client, pfx string, maxCreateRev int64) (*pb.ResponseHeader, error) {
getOpts := append(v3.WithLastCreate(), v3.WithMaxCreateRev(maxCreateRev))
for {
resp, err := client.Get(ctx, pfx, getOpts...)
if err != nil {
return nil, err
}
if len(resp.Kvs) == 0 {
return resp.Header, nil
}
lastKey := string(resp.Kvs[0].Key)
if err = waitDelete(ctx, client, lastKey, resp.Header.Revision); err != nil {
return nil, err
}
}
}
func waitDelete(ctx context.Context, client *v3.Client, key string, rev int64) error {
cctx, cancel := context.WithCancel(ctx)
defer cancel()
var wr v3.WatchResponse
wch := client.Watch(cctx, key, v3.WithRev(rev))
for wr = range wch {
for _, ev := range wr.Events {
if ev.Type == mvccpb.DELETE {
return nil
}
}
}
if err := wr.Err(); err != nil {
return err
}
if err := ctx.Err(); err != nil {
return err
}
return fmt.Errorf("lost watcher waiting for delete")
}如果当前节点成功注册成为controller,则启动3个goroutine:
go HandleLeaderChange(leaderChan)
go WatchBrokers()
go WatchTopics()第一个非常重要,用来监视当前节点是否是controller,当自己成为controller和失去controller身份时,都需要做对应的处理动作。
第二个监视节点离线或者重新上线,当节点离线时,需要查看节点当前负责哪些分区副本,这些分区副本当中如果有leader副本则需要重新为这些其他失去leader副本的follower寻找leader. 首先在
第三个监视在etcd中topic的创建,如果有新的topic创建则收到topic的分区数量和每个分区的副本数量,按照全排列的算法分配到现有所有节点上。
接着将需要创建的topic名称和分区的数量通过RPC发送给各个节点。每个结点在收到后调用topics包下的CreatePartition在磁盘上创建和初始化topic以及分区目录。
然后在etcd的/topics-brokers/目录下创建每个topic->partition->replica的对应关系,例如在/topics-brokers/testtopic/partition-0/replica-0路径下保存的内容为:
{
"node_index":0,
"node_id":"node-0",
"topic_name":"testtopic",
"partition_index":0,
"replica_index":0,
"is_leader":true,
"hw":0,
"is_isr": true
}上面的路径保存的是以topic为维度的分区副本信息,还需要一个以节点为维度的分区副本信息。
所以在etcd的/brokers-topics/目录下保存node->topic->partition->replica的对应关系,例如在/brokers-topics/node-0/testtopic-partition0-replica0路径下保存的内容为:
{
"node_index":0,
"node_id":"node-0",
"topic_name":"testtopic",
"partition_index":0,
"replica_index":0,
"is_leader":true,
"hw":0,
"is_isr":false
}在创建分区时,默认指定序号号为0的副本是leader副本。
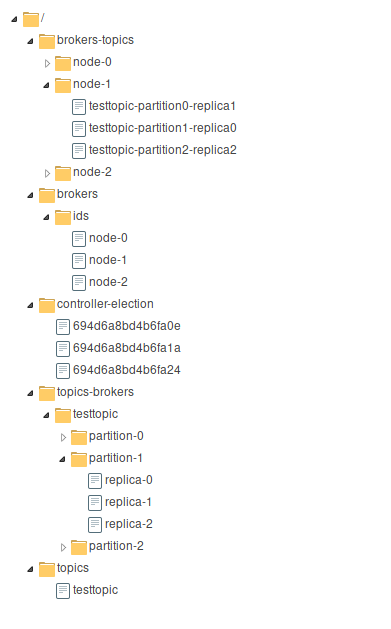
当节点启动完毕,在etcd注册了所有监听路径,并创建完成topic后,etcd中的存储内容如下:
- 当确认topic和其分区创建完毕后,就可以开始向follower发送指令,让follower向它们的副本leader开始同步数据。
- 首先client发送startSync指令给server,收到命令后server首先查询
/topics-brokers/目录下的topic信息,然后循环该目录下的所有分区和副本。 - 如果发现是leader副本,就调用RPC Client发送SYNC_MANAGER命令给leader副本所在的节点,告诉leader在其FollowerManager中提前加入follower的信息,方便在同步开始后leader维护follower的信息。
- 如果发现是follower副本,就调用RPC Client发送SYNC_SET命令给follower副本所在的节点,告诉follower接下来需要与哪个leader节点同步数据。
- follower收到SYNC_SET指令后,开启Syncer goroutine向leader节点同步。
- producer从API获取消息内容、topic名称、分区序号、ACK这个4个参数,前3个都很好理解,ACK是producer指定当前消息的需要获得怎样的确认。
- producer连接到任何一个节点询问当前controller节点的IP地址,接着连接controller节点根据需要写入的topic名称和分区序号,获取分区的leader副本所在的节点IP地址。
- producer连接到leader副本,将消息写入到leader节点。
- leader节点判断消息中是否指定了分区序号,如果没有指定则随机写入到某个分区。如果指定了分区序号,再判断消息是否有key,有则将key做hash和分区的数量取模,选择所在分区。
- leader节点根据消息中的ACK参数,如果是1, 则只需要leader节点写入数据到磁盘既可返回响应给producer. 如果ACK是-1,则需要根据全局的ISR参数或者当前分区的ISR参数值,再结合当前leader维护的ISR列表长度,选择两者中的最小值,作为leader需要等待同步的follower副本数量。
- leader或follower结点收到消息后,会将数据顺序的追加的active segment中,并在index中记录文件。
- 每个分区都会启动一个goroutine,定时的调用
msync系统调用将内存映射的文件同步到持久化存储中。
- consumer首先指定topic名称、分区序号、offset和消息数量参数,然后连接到controller节点,询问controller指定分区的leader副本的节点,得到响应后,再连接到leader副本节点。
- leader副本根据consumer请求的参数在本地磁盘中寻找相应的index和数据文件,找到segment文件后从指定的offset开始读取,读取到了指定的数量后就使用sendfile系统调用将消息发送给consumer.