- While using the kinect v2 sensor,I'm very surprised to find that I can't find a perfect kinect v2 urdf model. So I make this and hope this will help you.
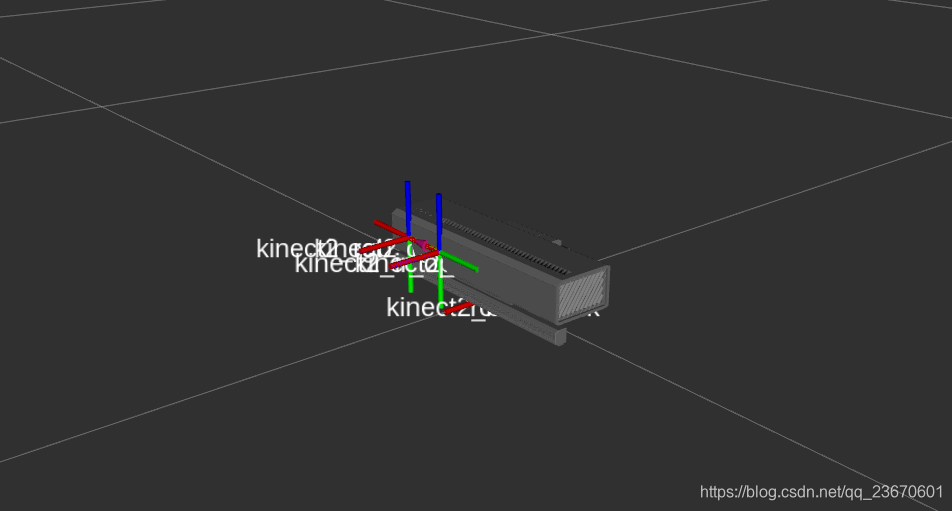
- To use in rviz:
roslaunch kinect_v2 display.launch
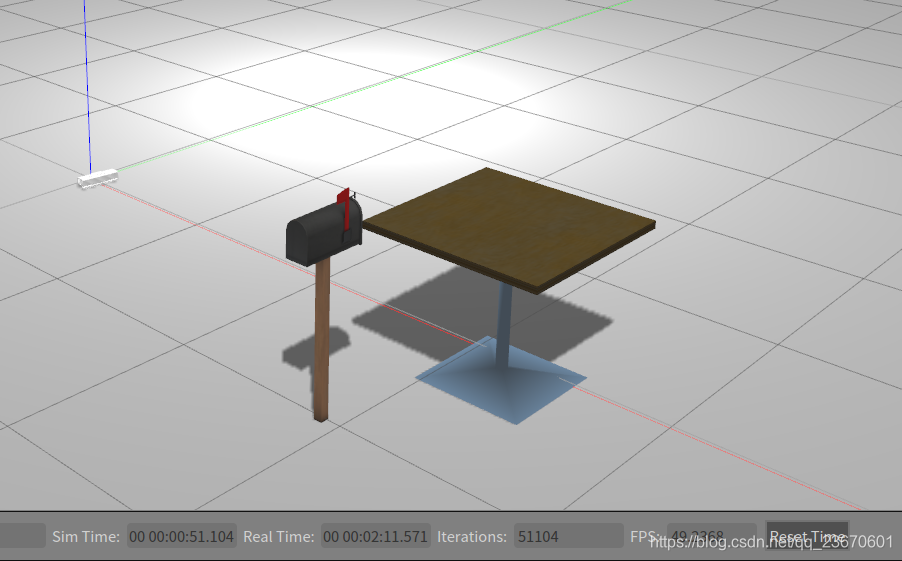
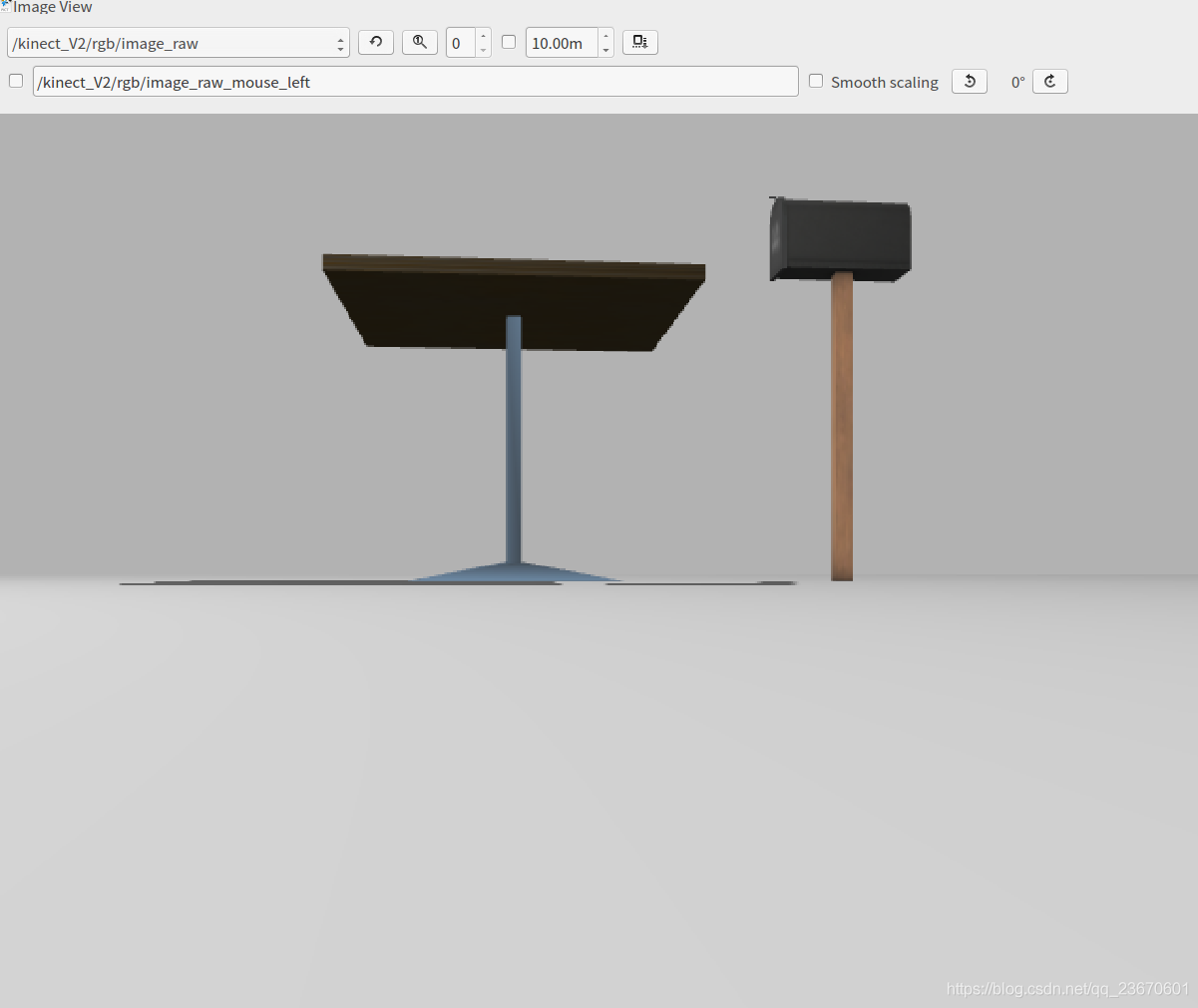
- To use in Gazebo:
roslaunch kinect_v2 gazebo.launch