**All the credit for original package and controller goes to Long Qian, Shuyang Chen for creating the prefab and initial script.
This fork Simulates UR using joint angles being published by a real robot over TCP IP.
(*Thanks to Bonghan Kim for his assistance)
You need to publish joint angles from UR script to this server in order to replicate motion.
Results on Editor:

I have used URSIM version 3.11 which can be downloaded from https://www.universal-robots.com/download/?option=18940.
Download vmware from https://www.vmware.com/products/workstation-pro/workstation-pro-evaluation.html. I think any version not so obsolete should work. Once you have installed vmware you should have two VMware Network Adapters named VMnet1 and VMnet8 in Windows network Connections.

-
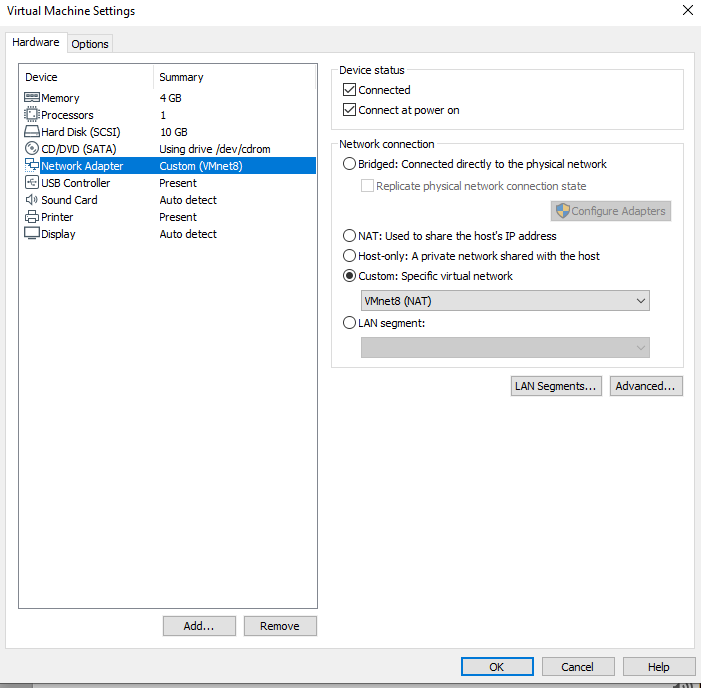
First you need to configure network settings in vmware. Go to Player->Manage-> Virtual Machine Settings. In "Device" panel choose "Network Adapter". In my case I choose VMnet8(NAT).
-
Open network adapter's properties in Windows and set static ip address of VMnet8 adapter. In my case it was
"192.168.102.128". I set ip of VMnet8 as "192.168.102.1" with same subnet mask. This will be the IP of your server. -
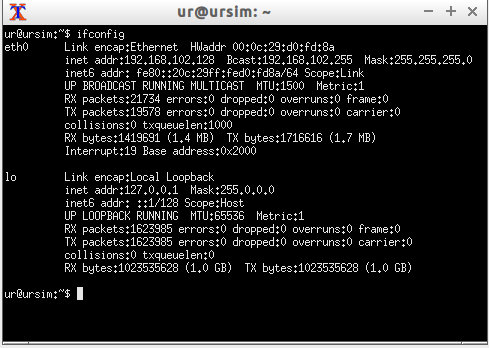
Check ipv4 address of guest in vmware using ifconfig.
-
Open URsim10/URsim5 and check robots network setting in "Setup Robot" -> Network. Choose DHCP. It will assign the same ip address to
the robot as that of guest (192.168.102.128) in my case.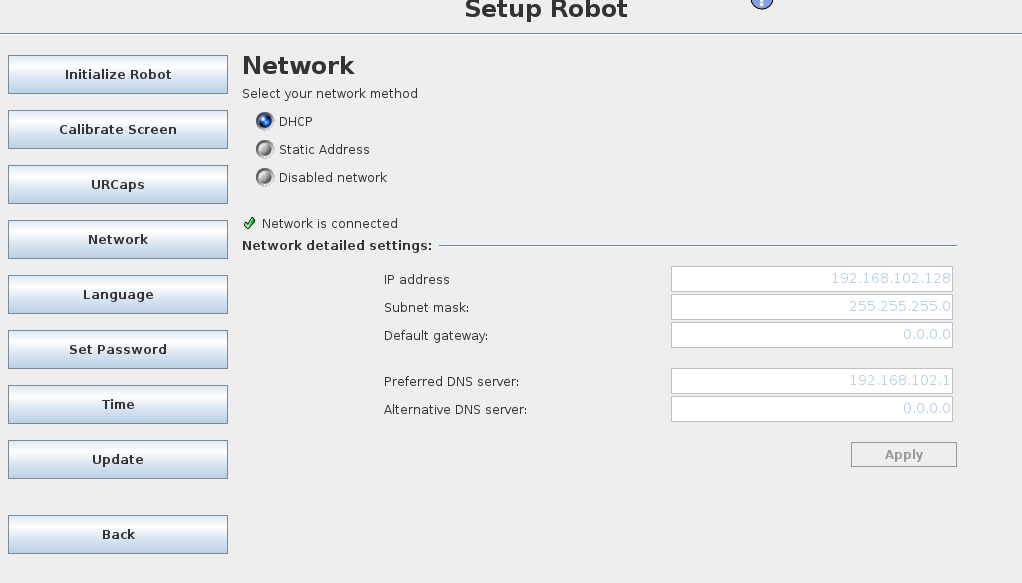
-
Disable firewall in windows otherwise guest wont be able to communicate with the host.
-
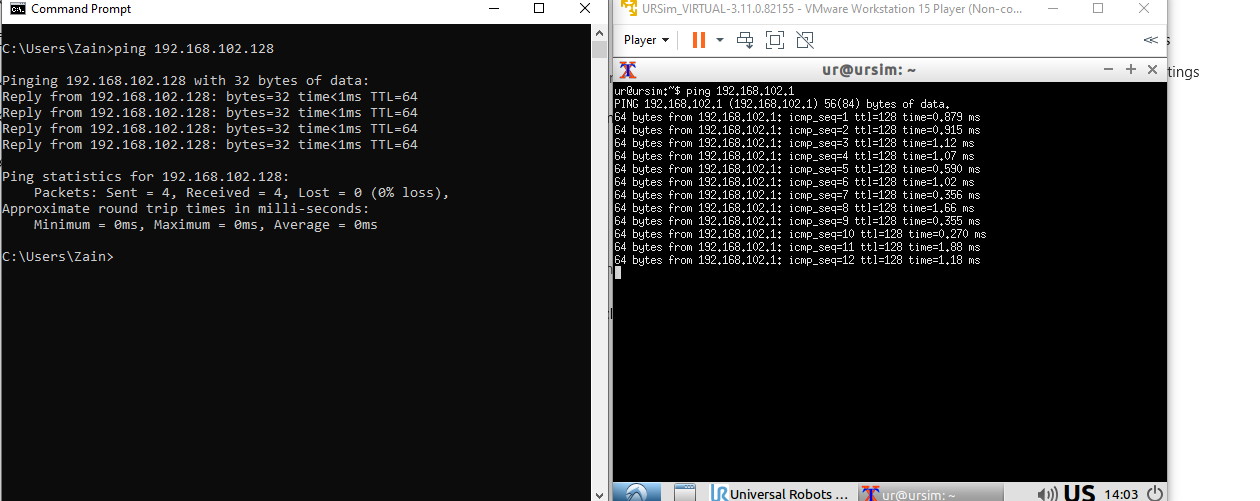
If everything goes well you should be able to ping back and forth between guest and the host.




Here is a simple UR script that will get joint angles and publish it to our server. Make sure to adjust IP addresses and ports accordingly.
Program
BeforeStart
Script: JointFunction.script
Robot Program
MoveJ
Waypoint_1
Waypoint_2
Thread_1
Loop sockon≟ True
getjointAngles()
Wait: 0.05
If sockon≟ False
socket_close("sock1")
sockon=socket_open("192.168.102.1",5000)
Wait: 0.01
global angles=[0,0,0,0,0,0]
global angles_send=""
sockon=socket_open("192.168.102.1",5000,"sock1")
def getjointAngles():
angles=get_actual_joint_positions()
angles_send=str_cat(angles[0],";")
angles_send=str_cat(angles_send,angles[1])
angles_send=str_cat(angles_send,";")
angles_send=str_cat(angles_send,angles[2])
angles_send=str_cat(angles_send,";")
angles_send=str_cat(angles_send,angles[3])
angles_send=str_cat(angles_send,";")
angles_send=str_cat(angles_send,angles[4])
angles_send=str_cat(angles_send,";")
angles_send=str_cat(angles_send,angles[5])
sockon= socket_send_line(angles_send)
end