VS Code ROS2开发模板,解决头文件引用问题,搭建debug调试环境。
支持clangd 以及 ccls
使用
克隆此项目
git clone git@github.com:skywalker-dell/vscode_ros2_template.git配置环境路径
-
在
c_cpp_properties.json中修改ROS2版本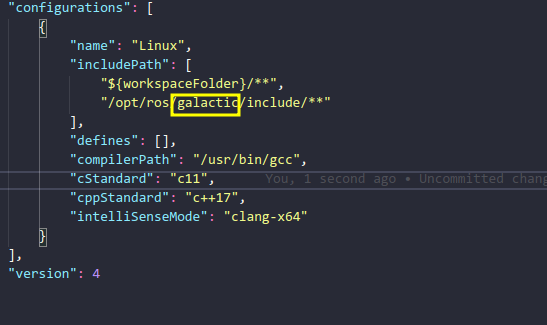
-
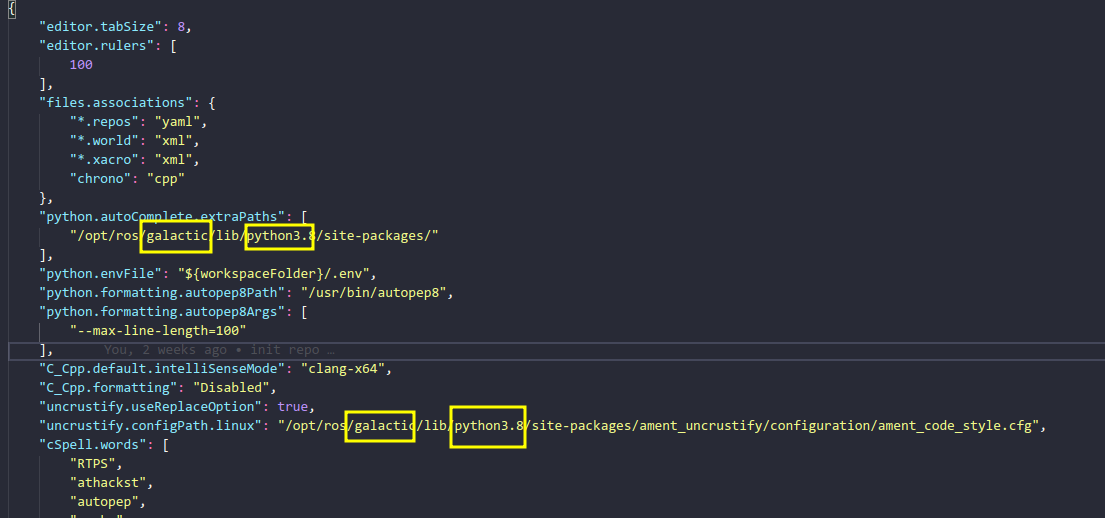
在
settings.json中修改ROS2版本和Python版本保证每处地方都被修改到
-
ctrl+shift+B先编译默认名为test的package。之所以这样做的原因是有时候单纯配置ROS2的环境变量无法解决头文件找不到的问题,必须在编译的时候加上-DCMAKE_EXPORT_COMPILE_COMMANDS=1这个选项之后才能解决。 -
之后就可以愉快的码代码而不用担心找不到定义的问题
-
若还是不行,将在build目录下的
compile_commands.json文件移动至项目的根目录下


调试项目
-
选择你要调试的package ,编译命令如下
colcon build --packages-select <package_name> --cmake-args -DCMAKE_BUILD_TYPE=Debug
-
在
launch.json中指定要调试这个package下的哪个executable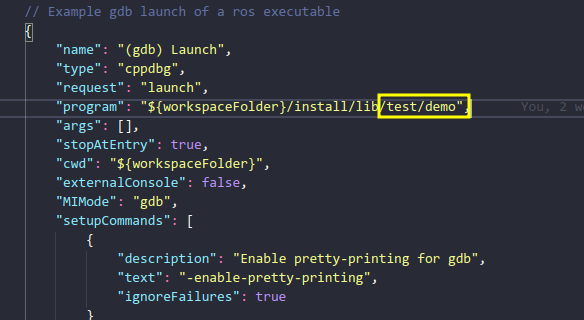
-
打断点,愉快debug