This repo is for the firmware that utilises the Raspberry Pi RP2040 micro controller OpenTrickler RP2040 Controller.
Join our discord server for help and development information.
-
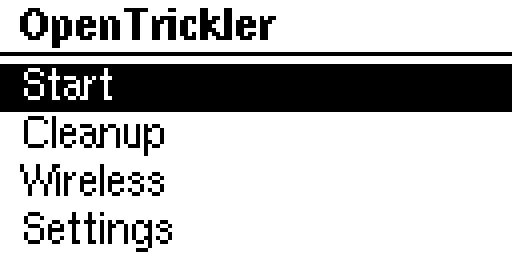
From the main menu, select "Start".
-
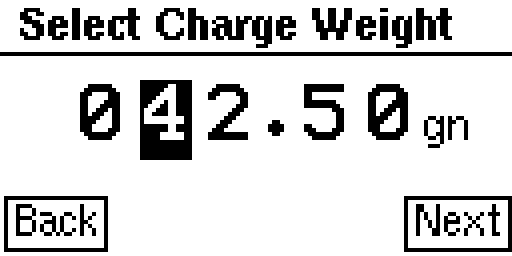
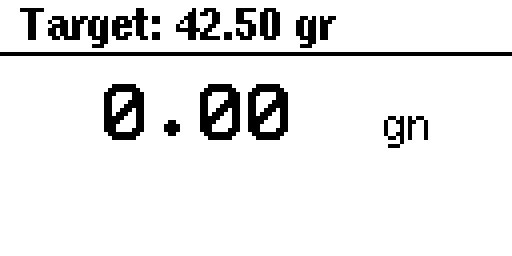
Provide the target charge weight in grain then press Next to continue.
-
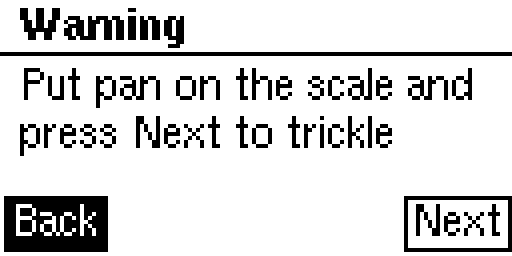
Remember to put pan on the scale.
-
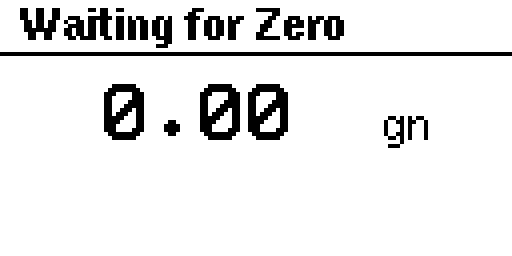
Wait for scale to stable at 0. Or press the rotary button to force Re-zero.
-
Wait for charge to reach the set point
-
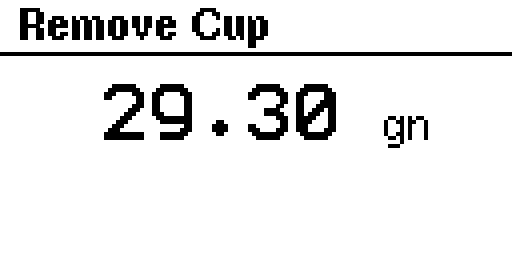
Once the charge set point is reached, remove the pan. The program shall restart from step 4.






![]()
You can download the pre-built firmware based on the latest release from above link. Similar to flashing other RP2040 firmware, you need to put the Pico W into the bootloader mode by pressing BOOTSEL button and plug in the micro-USB cable. Then you can copy the .uf2 file from the package to the pico. Shortly after the Pico W will be programmed automatically.
Git and Pico-SDK are required to build the firmware.
Using Git Bash clone the repository
git clone https://github.com/eamars/OpenTrickler-RP2040-Controller
Next change to the cloned directory
cd OpenTrickler-RP2040-Controller
Next use git to initalise the required submodules
git submodule init
Now using git clone all submodules
git submodule update --init --recursive
Using the Pico-Developer window navigate to the cloned directory.
cd Path:\to\cloned\repositoryNavigate to the build folder.
cd buildThen run the following comand
cmake .. -DPICO_BOARD=pico_w -DCMAKE_BUILD_TYPE=DebugOpen Pico-VisualStudioCode and open the OpenTrickler-RP2040-Controller folder then navigate to the cmake plugin and click Build All Projects.