

[IEEE RA-L] This repository is the official code for Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition.
Hogyun Kim, Jiwon Choi, Taehu Sim, Giseop Kim, Younggun Cho†
Spatial AI and Robotics Lab (SPARO)



- [August, 2024] A real-time Livox LiDAR SLAM package that integrates LOAM-Livox and SOLiD called SOLiD-LOAM-LIVOX will be released!!
- A FOV-agnostic LiDAR SLAM package that integrates A-LOAM and SOLiD.
- Ubuntu (version: 20.04)
- ceres (version: 1.14)
- gtsam (version: 4.0.0-alpha2)
-
Linux
mkdir -p ~/solid_aloam_ws/src cd ~/solid_aloam_ws/src git clone https://github.com/sparolab/SOLiD-A-LOAM.git cd ../ catkin_make source ~/solid_aloam_ws/devel/setup.bash roslaunch solid_a_loam solid_a_loam.launch -
Docker
nvidia-docker run --gpus all --privileged \ -it --name solid_aloam --ipc=host --shm-size=512M \ --device=/dev/video0:/dev/video0 -v /tmp/.X11-unix:/tmp/.X11-unix:ro \ -e DISPLAY=unix$DISPLAY -v /root/.Xauthority:/root/.Xauthority --env="QT_X11_NO_MITSHM=1" \ -v (your SOLiD-A-LOAM path):/home/solid_aloam_ws/src \ -v (your Datasets path):/home/storage1 cokr6901/solid-a-loam:latest
-
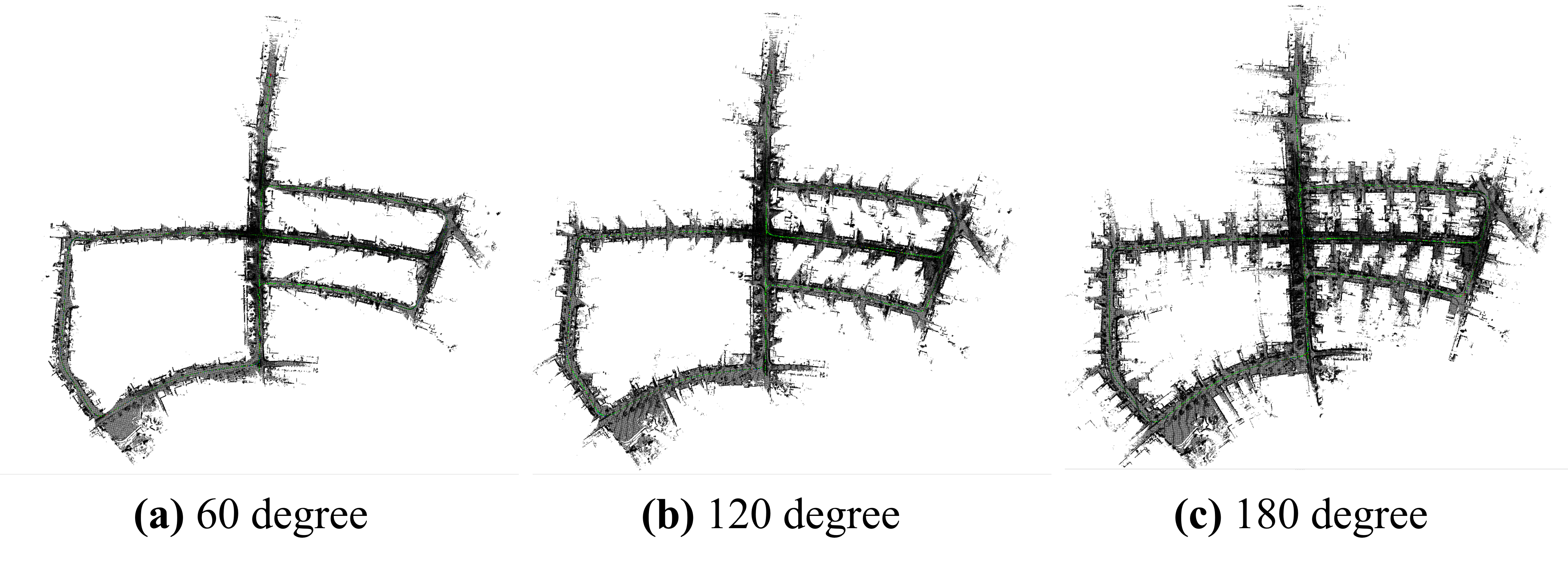
KITTI Datasets (Narrow FOV)
-


@article{kim2024narrowing,
title={Narrowing your FOV with SOLiD: Spatially Organized and Lightweight Global Descriptor for FOV-constrained LiDAR Place Recognition},
author={Kim, Hogyun and Choi, Jiwon and Sim, Taehu and Kim, Giseop and Cho, Younggun},
journal={IEEE Robotics and Automation Letters},
year={2024},
publisher={IEEE}
}
- Hogyun Kim (hg.kim@inha.edu)
- Jiwon Choi (jiwon2@inha.edu)
Thank you Giseop Kim for providing the base code.