This is a ros2 port of the original repo: https://github.com/Livox-SDK/livox_laser_simulation.
Tested in ros2 foxy and humble.
In this simulation project, Livox series lidars will publish two types of messages:
livox_ros_driver2/msg/CustomMsg
sensor_msgs/msg/PointCloud2
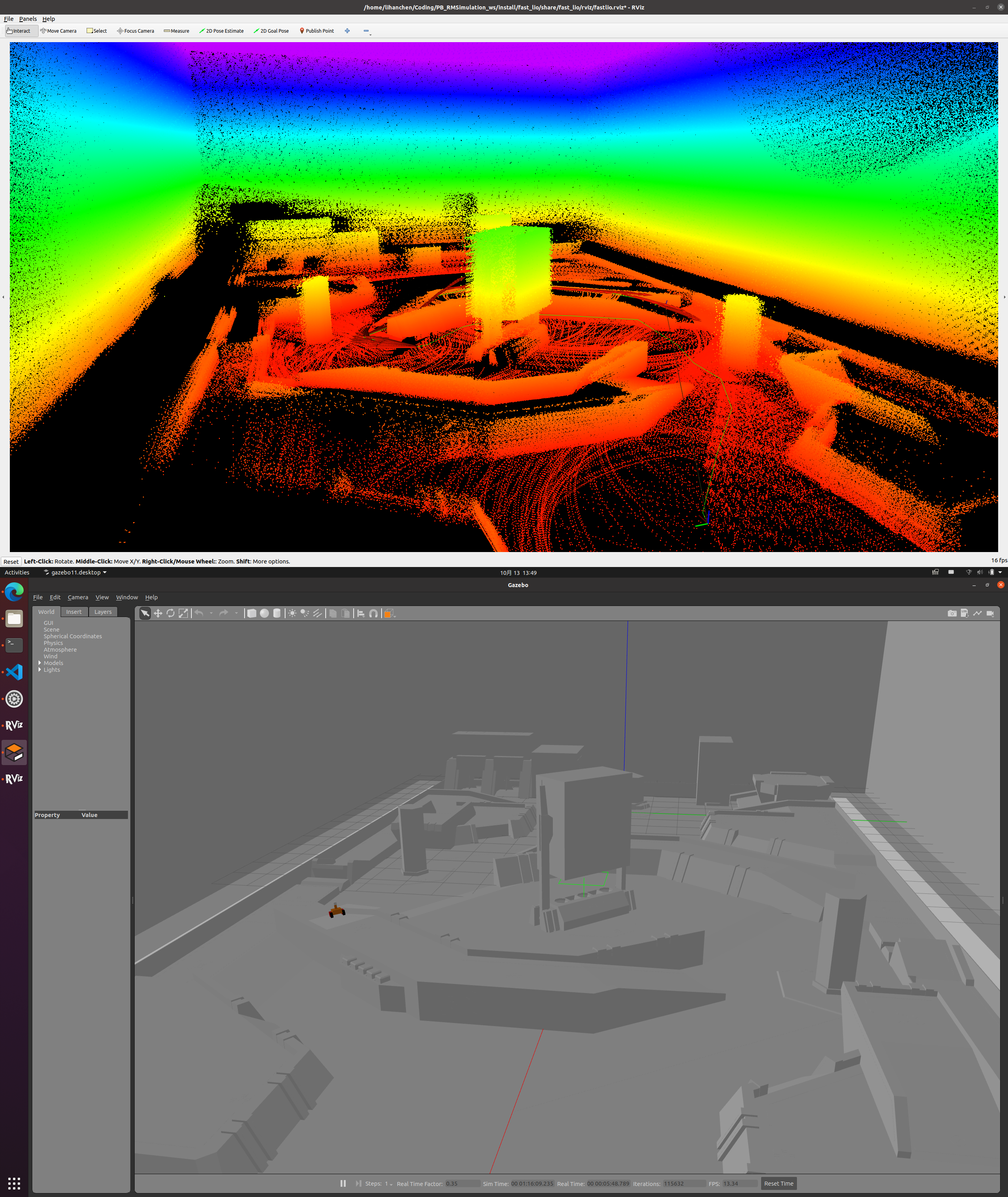
Therefore, by subscribing to the CustomMsg message, you can use the FAST_LIO algorithm in the your simulation.

-
Clone this repo in your ros2 workspace
git clone https://github.com/LihanChen2004/livox_laser_simulation_ros2.git -
build your ros2 workspace (if there are warnings that do not allow the compilation, run the build again and you will see that the error disappears)
colcon build && source install/setup.bash
-
include the lidar sensor in your URDF file, for example:
<xacro:include filename="$(find ros2_livox_simulation)/urdf/mid70.xacro" /> -
attach the sensor to your robot in the URDF (or xacro) file, for example:
<xacro:mid70 name="livox" parent="base_link" topic="mid70"> <origin xyz="0 0 0.025" rpy="0 0 0"/> </xacro:mid70>you need to specify the parent link (usually base_link)
that's it. the example that i gave you is for mid70, but you can use mid40, mid70, mid360 and so on.
thanks to the original repo, you can find more info in it.
-
ROS2-Gazebo simulation package for RoboMaster University Championship
You can use FAST_LIO by taking it as an example :)