A new library including more fuctionality for 360 is under contruction by my colleague. This repo will be depreciated then.
Features of this project:
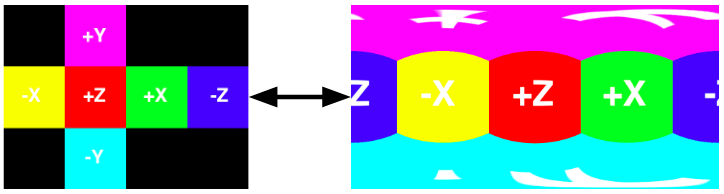
- Convertion between cubemap and equirectangular
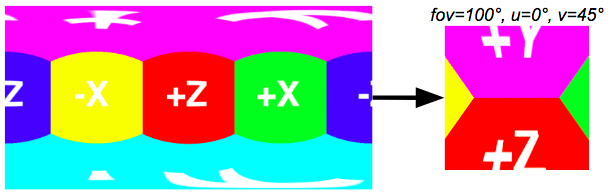
- Equirectangular to planar
- Pure python implementation and depend only on numpy and scipy
- Vectorization implementation (in most of the place)
c2etakes 300ms ande2ctakes 160ms on 1.6 GHz Intel Core i5 CPU


- numpy
- scipy
- pillow (for example code to load/save image)
pip install py360convert
Now at everywhere, you can import py360convert or use the command line tool convert360.
You can run command line tool to use the functionality. Please See convert360 -h for detailed. The python script is also an example code to see how to use this as a package in your code.
convert360 --convert e2c --i assert/example_input.png --o assert/example_e2c.png --w 200
| Input Equirectangular | Output Cubemap |
|---|---|
 |
 |
convert360 --convert c2e --i assert/example_e2c.png --o assert/example_c2e.png --w 800 --h 400
| Input Cubemap | Output Equirectangular |
|---|---|
|
 |
You can see the blurring artifacts in the polar region because the equirectangular in above figure are resampled twice (e2c then c2e).
convert360 --convert e2p --i assert/example_input.png --o assert/example_e2p.png --w 300 --h 300 --u_deg 120 --v_deg 23
| Input Equirectangular | Output Perspective |
|---|---|
|
 |
Convert the given equirectangular to cubemap.
Parameters:
e_img: Numpy array with shape [H, W, C].face_w: The width of each cube face.mode:bilinearornearest.cube_format: Seec2eexplaination.
Take perspective image from given equirectangular. Parameters:
e_img: Numpy array with shape [H, W, C].fov_deg: Field of view given in int or tuple(h_fov_deg, v_fov_deg).u_deg: Horizontal viewing angle in range [-pi, pi]. (- Left / + Right).v_deg: Vertical viewing angle in range [-pi/2, pi/2]. (- Down/ + Up).out_hw: Output image(height, width)in tuple.in_rot_deg: Inplane rotation.mode:bilinearornearest.
Convert the given cubemap to equirectangular.
Parameters:
cubemap: Numpy array or list/dict of numpy array (depend oncube_format).h: Output equirectangular height.w: Output equirectangular width.cube_format: 'dice' (default) or 'horizon' or 'dict' or 'list'. Telling the format of the givencubemap.- Say that each face of the cube is in shape of
256 (width) x 256 (height) - 'dice': a numpy array in shape of
1024 x 768like below example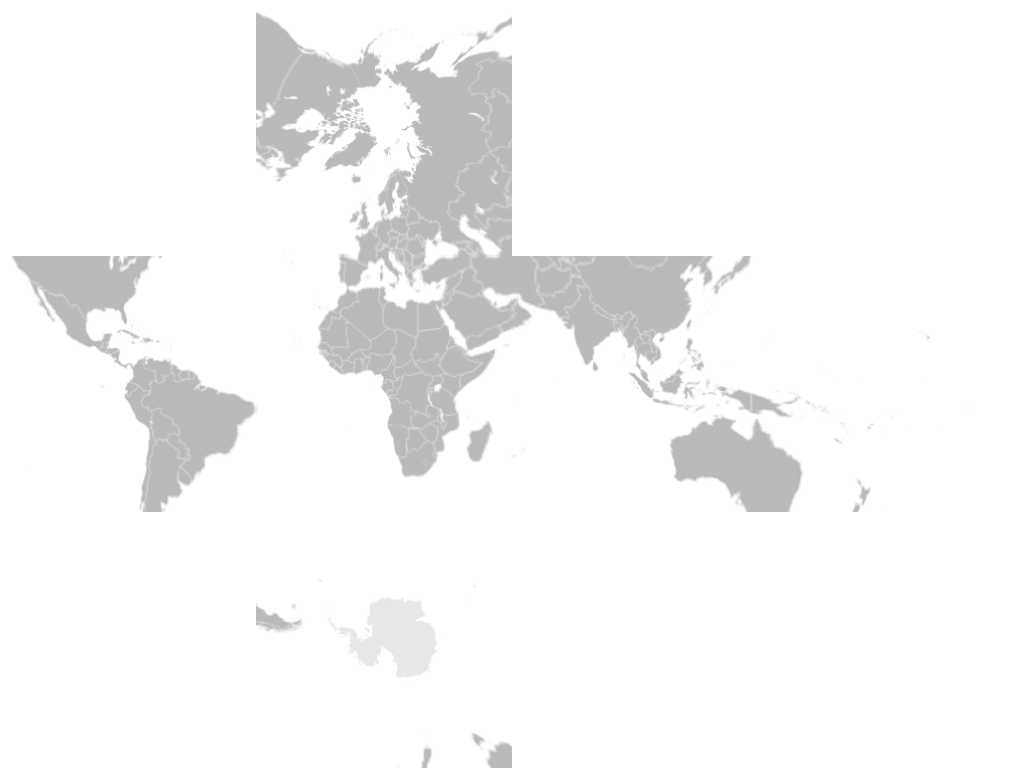
- 'horizon': a numpy array in shape of
1536 x 256like below example
- 'list': a
listwith 6 elements each of which is a numpy array in shape of256 x 256. It's just converted from 'horizon' format with one line of code:np.split(cube_h, 6, axis=1). - 'dict': a
dictwith 6 elements with keys'F', 'R', 'B', 'L', 'U', 'D'each of which is a numpy array in shape of256 x 256. - Please refer to the source code if you still have question about the conversion between formats.
- Say that each face of the cube is in shape of


Example:
import numpy as np
from PIL import Image
import py360convert
cube_dice = np.array(Image.open('assert/demo_cube.png'))
# You can make convertion between supported cubemap format
cube_h = py360convert.cube_dice2h(cube_dice) # the inverse is cube_h2dice
cube_dict = py360convert.cube_h2dict(cube_h) # the inverse is cube_dict2h
cube_list = py360convert.cube_h2list(cube_h) # the inverse is cube_list2h
print('cube_dice.shape:', cube_dice.shape)
print('cube_h.shape:', cube_h.shape)
print('cube_dict.keys():', cube_dict.keys())
print('cube_dict["F"].shape:', cube_dict["F"].shape)
print('len(cube_list):', len(cube_list))
print('cube_list[0].shape:', cube_list[0].shape)Output:
cube_dice.shape: (768, 1024, 3)
cube_h.shape: (256, 1536, 3)
cube_dict.keys(): dict_keys(['F', 'R', 'B', 'L', 'U', 'D'])
cube_dict["F"].shape: (256, 256, 3)
len(cube_list): 6
cube_list[0].shape: (256, 256, 3)