你可以使用本项目,自动生成多个嵌入式设备和Simulink代码,快速构建Simulink和多个嵌入式设备的交互程序。一些典型的应用如下:
- 舵机控制:通过Simulink执行算法,连接Arduino执行
- 便携数据采集设备(./Example/ESP32_PlatformIO_Arduino):通过Arduino采集相关传感器的信息,并自动发送到Simulink中,构建上位机系统
本项目具有以下功能和特点:
- 封装ModbusRTU通讯协议(Simulink为主站,嵌入式设备为从站),使用嵌入式系统自带的串口通讯,不占用额外的系统资源
- 根据配置文件,自动生成相应代码
EmbededCodeGenerater.exe文件可以直接运行,源码在./EmbededCodeGenerater/code中,可以自行查阅
-
将
SimulinkLibrary文件夹所在位置和SimulinkLibrary/jsonlab-2.0添加到MATLAB的设置路径中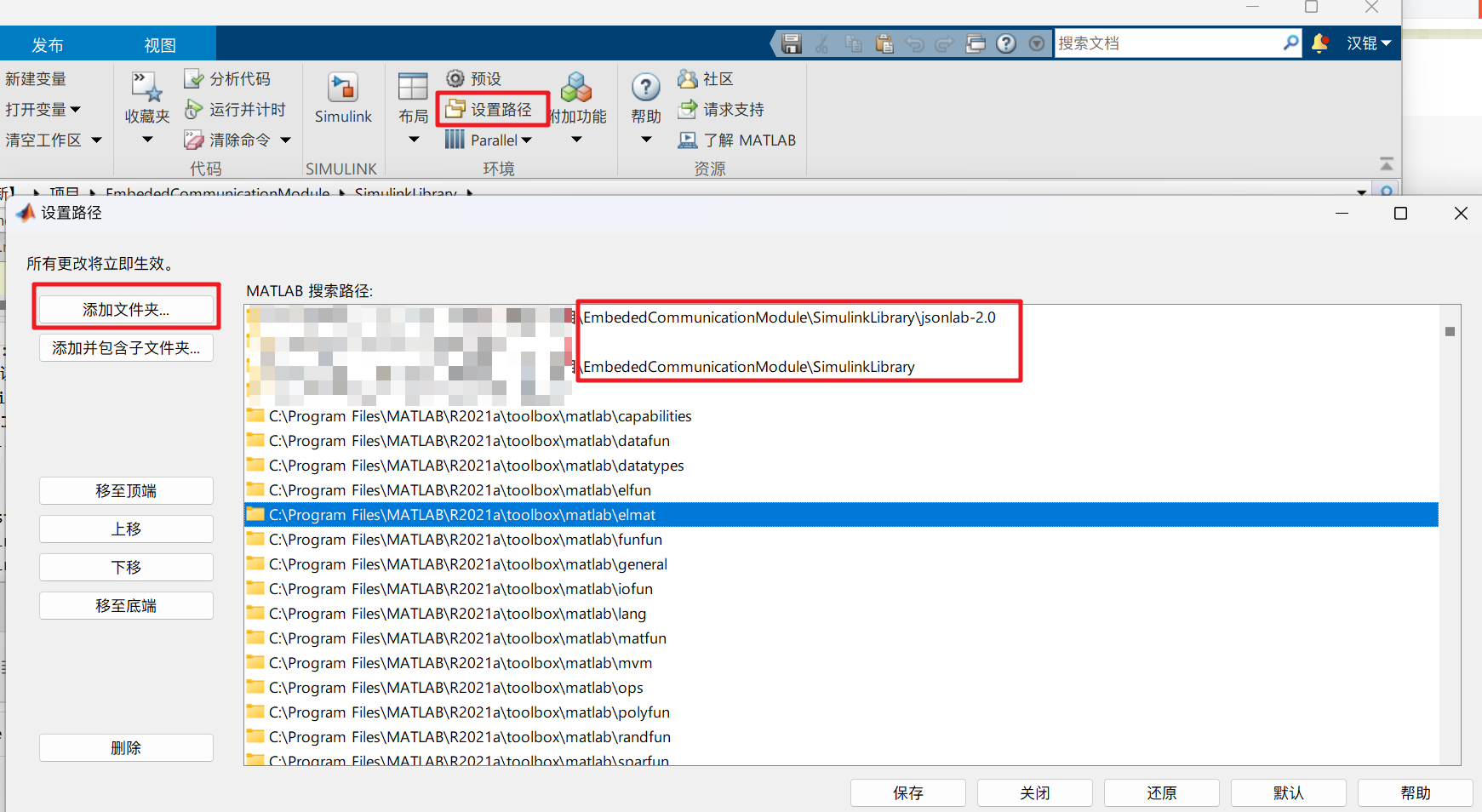
-
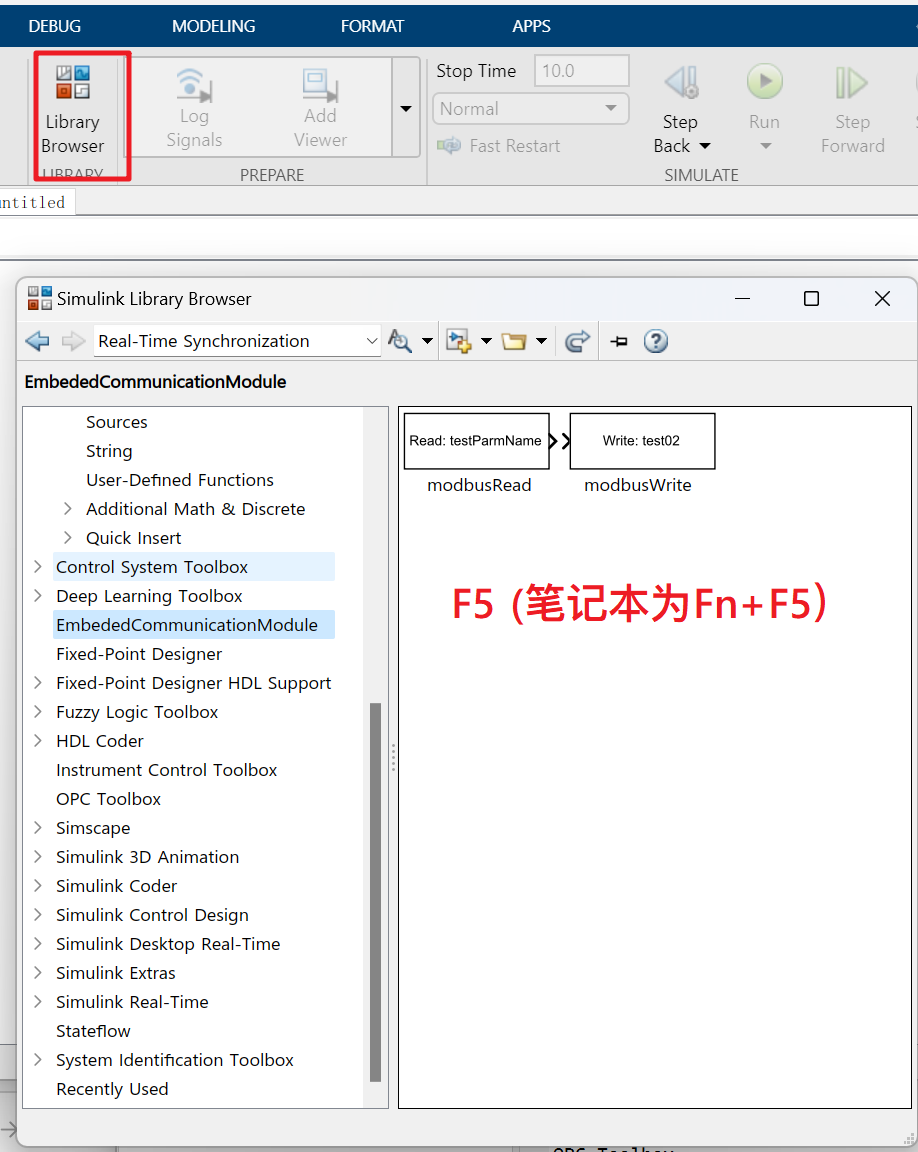
在Simulink Library中F5刷新存储库,加载EmbededCommunicationModel模块


现在,可以使用UI界面来对配置文件进行编辑,双击打开EmbededCodeGenerater.exe(第一次使用需要较长时间打开),打开后系统浏览器自动打开如下界面:

使用方法如下:
- 先选择文件保存路径,即
modbus_config.json文件保存路径(如果该路径中含有之前的modbus_config.json,则默认读取已有的数据) - 进行基础配置,配置端口和波特率
- 配置从机相关信息
- 自动导出配置
一个典型的配置文件是由modbus_config.json进行表示,Json中需要包含如下内容:
-
port:电脑和嵌入式设备的通讯端口,如
COM1 -
baudRate:串口波特率
-
msgConfig:关于待传输变量的配置信息,一个典型的变量信息由以下字段进行描述
-
slaveID:Modbus Slave设备(嵌入式设备)的ID,该ID的目的是区分每个变量对应存储的嵌入式设备。
-
address:变量对应的Modbus地址
-
gain:增益
-
bias:偏置
需要注意的是,本项目采用Modbus中的保持寄存器进行传输,保持寄存器要求传输的是uint16大小的数据,当数据超过范围时,需要进行以下变换:
传输数据 = 原始数据 * gain + bias
如果无需进行变换,则 gain = 1 以及 bias = 0
-
下面给出一个例子,在该实例中,以115200的波特率,在COM9上进行通讯,同步ECMtest01~ECMtest044个变量,这些变量可以分散在不同的设备当中,以slaveID进行区分。
{
"port": "COM9",
"baudRate": 115200,
"msgConfig": {
"ECMtest01": {
"slaveID": 1,
"address": 0,
"gain": 1,
"bias": 0
},
"ECMtest02": {
"slaveID": 1,
"address": 1,
"gain": 1,
"bias": 0
},
"ECMtest03": {
"slaveID": 1,
"address": 2,
"gain": 1,
"bias": 0
},
"ECMtest04": {
"slaveID": 1,
"address": 3,
"gain": 1,
"bias": 0
}
}
}运行EmbededCodeGenerater.exe文件,配置完成之后,会自动生成若干个ecm_n.cpp和ecm_n.h文件,n为对应的SlaveID
如果Simulink需要同时控制两个嵌入式设备,SlaveID分别为01和02,则会生成
ecm_1.cpp和ecm_1.h文件:拷贝到嵌入式设备1的工程当中ecm_2.cpp和ecm_2.h文件:拷贝到嵌入式设备2的工程当中
自动生成的代码依赖以下运行环境:
- FreeRTOS等操作系统
- Arduino框架
- modbus-esp8266:一个基于Arduino框架的通用modbus库(包括但不限于esp8266)
提供的api如下:
mb.task():mb是modbusRTU实例化出来的对象,需要周期性调用mb.task()完成通讯任务bool modbusWrite(parmName, double value):对数据进行传送,主要这里给出原始数据即可,变量变换在函数体内部完成uint16_t modbusRead(parmName):读取数据,默认读出的类型为uint16_t ,如果需要读浮点数,请手动更改返回值类型
一个典型的main.cpp文件(或main.ino)如下
#include <Arduino.h> # Arduino 框架,如果使用PlatformIO,保留这一行,如果使用ArduinoIDE,删去即可
#include <ModbusRTU.h> # modbus-esp8266库中的ModbusRTU模块
#include "ecm_1.h" # 自动生成的头文件
void modbus_comm(void *pt) # 循环运行mb.task,进行通讯与相应
{
while (1)
{
mb.task();
vTaskDelay(50);
}
}
void test_send(void *pt) # 需要对变量读写的场合
{
uint32_t i = 0;
while (1)
{
modbusWrite(ECMtest01,i);
modbusWrite(ECMtest02,i);
modbusWrite(ECMtest03,i);
modbusWrite(ECMtest04,i);
i++;
vTaskDelay(1000);
}
}
void setup()
{
Serial.begin(115200, SERIAL_8N1);
Serial.println("hello world");
mb.begin(&Serial);
modbusRTUConfig();
xTaskCreate(modbus_comm,
"ModbusComm",
1024,
NULL,
2,
NULL);
xTaskCreate(test_send,
"test_send",
1024,
NULL,
1,
NULL);
}
void loop()
{
;
}本项目依赖的MATLAB Toolbox有:
- Instrument Control Toolbox
- Simulink Desktop Real-Time
- Simulink Real-Time
在MATLAB当中运行InitECM脚本,并输入modbus_config.json文件的完整路径

-
拖入Real-time Sync模块,用于将仿真时间和系统时间进行同步
-
拖入modbusRead或者modbusWrite模块,用于和嵌入式设备进行通讯,在模块中,你唯一需要指定的是在json中提供的变量名称,如
ECMtest01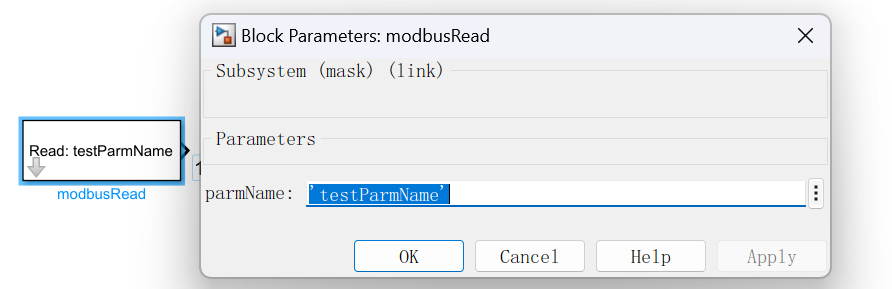

一个典型的系统如下图所示
