There is an object detection algorithm called YOLO (You Only Live Once). In this case, the entire image is processed by a single neural network. Image regions are divided up by this network. It then forecast boxes and probabilities for each region. A probability distribution is applied to these bounding boxes in order to determine their weighting.
-
Firstly, we import the essential libraries.
import cv2 #for image processing import numpy as np #for numeric calculations # from google.colab.patches import cv2_imshow
-
Then, we import the datasets. Download the full dataset archive from here. Also, we store the final or output layer of the architecture because we are concerned with the outputs.
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg") layer_names = net.getLayerNames() output_layers = [layer_names[i[0] - 1] for i in net.getUnconnectedOutLayers()] with open("coco.names", "r") as f: classes = [line.strip() for line in f.readlines()] colors = np.random.uniform(0, 255, size=(len(classes), 3))
-
Now, provide an input video file. This project's sample video can be downloaded from here.
cap = cv2.VideoCapture("sample.mp4")

-
Set the label font for YOLO detction.
font = cv2.FONT_HERSHEY_PLAIN
-
Set the time, using the time library.
import time starting_time = time.time()
-
Set the output file configurations.
result = cv2.VideoWriter('output.mp4', cv2.VideoWriter_fourcc(*'MJPG'),25, (640, 352))
-
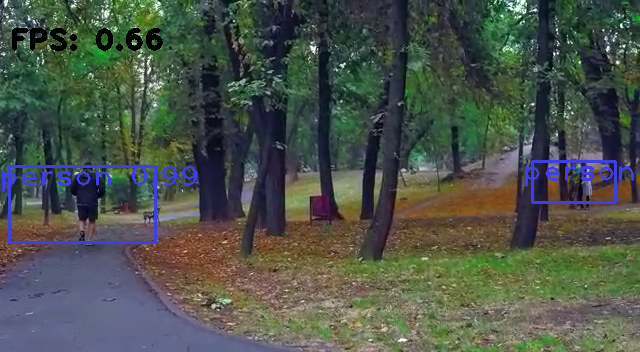
The loop starts to ork on the input video, frame by frame.
frame_id = 0 while True: #infinite loop _, frame = cap.read() #reading frame by frame frame_id += 1 #interator to calculate the frames height, width, channels = frame.shape #configuration of each frame blob = cv2.dnn.blobFromImage(frame, 0.00392, (416, 416), (0, 0, 0), True, crop=False) #416x416 resizing + channel reorder net.setInput(blob) #fed to YOLO network outs = net.forward(output_layers) #output from YOLO network, detected images class_ids = [] #coco.name object confidences = [] #detection accuracy boxes = [] #boxes around a person for out in outs: #object detection for detection in out: #detection = outs[i] scores = detection[5:] #The actual confidence intervals are a percentage value between 0 and 1 for all 80 classes. class_id = np.argmax(scores) confidence = scores[class_id] if confidence > 0.2: center_x = int(detection[0] * width) center_y = int(detection[1] * height) w = int(detection[3] * width) h = int(detection[3] * height) x = int(center_x - w / 1.8) y = int(center_y - h / 1.8) boxes.append([x, y, w, h]) #setting calculated vertices confidences.append(float(confidence)) class_ids.append(class_id) indexes = cv2.dnn.NMSBoxes(boxes, confidences, 0.4, 0.3) #remove overlapping boxes for i in range(len(boxes)): #drawing the box if i in indexes: x, y, w, h = boxes[i] #getting vertices for the box label = str(classes[class_ids[i]]) #getting detected labels confidence = confidences[i] #getting detection percents color = colors[class_ids[i]] cv2.rectangle(frame, (x+10, y+10), (x + w, y + h), color, 2) #setting the box cv2.putText(frame, label + " " + str(round(confidence, 2)), (x, y + 30), font, 2, color, 2) #editing the box into the frame(s) image elapsed_time = time.time() - starting_time #calculating the time passed fps = frame_id / elapsed_time #calculating the preset frame cv2.putText(frame, "FPS: " + str(round(fps, 2)), (10, 50), font, 2, (0, 0, 0), 3) #editing the frame number on the image(s) result.write(frame) #rendering the frame(s) into the output video # cv2_imshow(frame) if cv2.waitKey(1) ==ord('q'): break cap.release() cv2.destroyAllWindows()