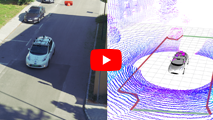
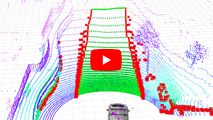
urban_road_filter: a real-time LIDAR-based urban road and sidewalk detection algorithm for autonomous vehicles


Use the following commands to download and compile the package.
cd ~/catkin_ws/src
git clone https://github.com/jkk-research/urban_road_filter
catkin build urban_road_filter
Issue the following commands to start roscore, download and play sample data, and start the algorithm with visualization. You can also watch this as a youtube tutorial.
In a new terminal start roscore:
roscore
In a new terminal go to your bag folder (e.g. ~/Downloads):
cd ~/Downloads
Download a sample rosbag (~3,3 GB):
wget https://laesze-my.sharepoint.com/:u:/g/personal/herno_o365_sze_hu/EYl_ahy5pgBBhNHt5ZkiBikBoy_j_x95E96rDtTsxueB_A?download=1 -O leaf-2021-04-23-campus.bagPlay rosbag:
rosbag play -l ~/Downloads/leaf-2021-04-23-campus.bagIn a new terminal start the urban_road_filter node, rviz and rqt_reconfigure with roslaunch:
roslaunch urban_road_filter demo1.launch
If you use any of this code please consider citing the paper:
@Article{roadfilt2022horv,
title = {Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles},
author = {Horváth, Ernő and Pozna, Claudiu and Unger, Miklós},
journal = {Sensors},
volume = {22},
year = {2022},
number = {1},
url = {https://www.mdpi.com/1424-8220/22/1/194},
issn = {1424-8220},
doi = {10.3390/s22010194}
}points_preprocessorray_ground_filterandring_ground_filter(ROS)linefit_ground_segmentation(ROS)curb_detection(ROS)3DLidar_curb_detection(ROS)- Many more algorithms without code mentioned in the paper.





flowchart LR
P[points] -->|sensor_msgs/PointCloud2| U(urban_road_filt)
U --> |sensor_msgs/PointCloud2| A[curb]
U --> |sensor_msgs/PointCloud2| B[road]
U --> |sensor_msgs/PointCloud2| C[road_probably]
U --> |sensor_msgs/PointCloud2| D[roi]
U --> |visualization_msgs/MarkerArray| E[road_marker]