Autor: Sifaqes Zerrouki. Univrssidad de Alicante . Escuela Superior Politécnica. Máster Universitario en Automática y Robótica. Personal email:siphaxtfm@gmail.com
Brazo_Serial.online-video-cutter.com.mp4

• Capítulo 1: Introducción El primer capítulo presenta el alcance de este proyecto. Además, explica los problemas planteados y los objetivos deseados y los pasos que seguirán.
• Capítulo 2: Preparación del entorno ROS para RPi. Preparamos lo necesario de la plataforma, así como las tarjetas el software y sus bibliotecas y paquetes del trabajo.
• Capítulo 3: Diseño 3D de la plataforma modular. El tercer capítulo está reservado para el diseño la plataforma modular que desarrollaremos.
• Capítulo 4: Un brazo desarrollado con la comunicación serial RPi y Arduino El tercer capítulo construimos un brazo 6DOF y detalla el proceso de desarrollar una comunicación serial entre la RPi y Arduino, es decir cómo se comunica entre ellos.
Este proyecto pretende crear una plataforma modular basada en RPi y Arduino, en la que se conecten entre ellas con comunicación serial. El proyecto se puede probar en empresas emergentes de tecnología industrial que busquen una alternativa fácil, barata y de código abierto. Aunque estos robots en teoría están basados en diferentes lenguajes de programación y en consecuencia no sería posible de ninguna manera comunicarse entre ellos (así como Arduino y Python, por ejemplo) el gran reto en este trabajo es hacerlo posible mediante la instalación de diferentes robots que se controlen entre ellos gracias a la comunicación serial. Por otro lado, la plataforma tiene aplicación en las empresas agrícolas e industriales; desde un brazo robótico que hace un proceso de tratamiento de una cinta de producción de frutas o hasta un brazo robótico industrial que suelda carrocería del coche.

Para instalar la versión ROS kinetic tendremos iniciar sesión en RPi. Luego ejecute estos comandos para agregar el repositorio de paquetes ROS [2], construir herramientas e inicializar la herramienta de dependencia ROS .
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt-get update
sudo apt-get install -y python-rosdep python-rosinstall-generator python-wstool python-rosinstall build-essential cmake
sudo rosdep init
rosdep update
Creé un espacio de trabajo para construir ROS Kinetic desde la fuente.
mkdir ~/ros_catkin_ws
cd ~/ros_catkin_ws
rosdep update
Despues Install el sistema:
rosinstall_generator ros_comm --rosdistro kinetic --deps --wet-only --tar > kinetic-ros_comm-wet.rosinstall
wstool init -j8 src kinetic-ros_comm-wet.rosinstall
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
La construcción de ROS en este punto fallará con varios errores. Arreglemos esos errores editando manualmente el código fuente de ROS. Vamos a editar este fechero. Retomaremos este punto en el apartado de las conclusiones:
línea 885: enlace siguiente:
Creé un espacio de trabajo para construir ROS Kinetic desde la fuente.
/home/pi/ros_catkin_ws/src/opencv3/modules/python/src2/cv2.cpp
Debemos reemplazar
char* str = PyString_AsString(obj);
con
const char* str = PyString_AsString(obj);
A continuación, editamos los archivos.
/home/pi/ros_catkin_ws/src/rospack/include/rospack/rospack.h
/home/pi/ros_catkin_ws/src/rospack/src/rospack.cpp
/home/pi/ros_catkin_ws/src/rospack/src/utils.cpp
Eliminamos todas las apariciones de
/tr1
Y reemplazamos todas las apariciones de
std::tr1
con
boost
Editamos los archivos a continuación.
/home/pi/ros_catkin_ws/src/actionlib/include/actionlib/client/simple_action_client.h
/home/pi/ros_catkin_ws/src/actionlib/include/actionlib/destruction_guard.h /home/pi/ros_catkin_ws/src/actionlib/include/actionlib/server/simple_action_server_imp.h
/home/pi/ros_catkin_ws/src/actionlib/src/connection_monitor.cpp /home/pi/ros_catkin_ws/src/actionlib/test/destruction_guard_test.cpp
/home/pi/ros_catkin_ws/src/bond_core/bondcpp/src/bond.cpp /home/pi/ros_catkin_ws/src/ros_comm/roscpp/include/ros/timer_manager.h
/home/pi/ros_catkin_ws/src/ros/roslib/test/utest.cpp
Reemplazamos todas las apariciones de todos los archivos cada uno manualmente.
boost::posix_time::milliseconds(…)
con:
boost::posix_time::milliseconds(int(…))
Y editamos el archivo a continuación.
/home/pi/ros_catkin_ws/src/geometry2/tf2/src/buffer_core.cpp
Debemos Reemplazamos
logWarn
con:
CONSOLE_BRIDGE_logWarn
Y reemplazamos
logError
con:
CONSOLE_BRIDGE_logError
Ahora, se construye ROS Kinetic en este punto, la compilación debería realizarse correctamente.
cd ~/ros_catkin_ws
sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/kinetic
Agregamos a ~ / .bashrc y también ejecutamos en su Shell:
source /opt/ros/kinetic/setup.bash
o puede usar esto:
source /opt/ros/kinetic/setup.bash

Para el modelado paramétrico usaremos FreeCAD con licencia de código abierto, con el objetivo de diseñar una caja que necesitaríamos para la RPi y Arduino Mega y Arduino Uno. Esto nos permitirá diseñar una plataforma modular 3D, compatible con los tres modelos [4].

4.1. Circuito de alimentación Es muy fácil controlar el servomotor directamente desde el Arduino. Sin embargo, el servomotor puede requerir más corriente de la que puede proporcionar Arduino. El siguiente ejemplo utiliza un servomotor que recibe corriente directamente del Arduino a través de USB.
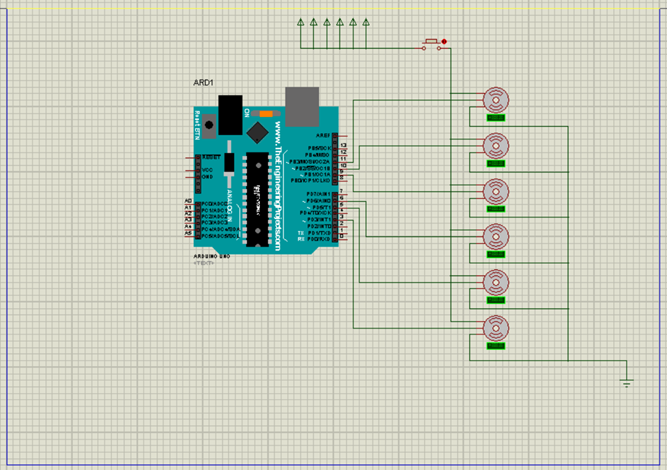
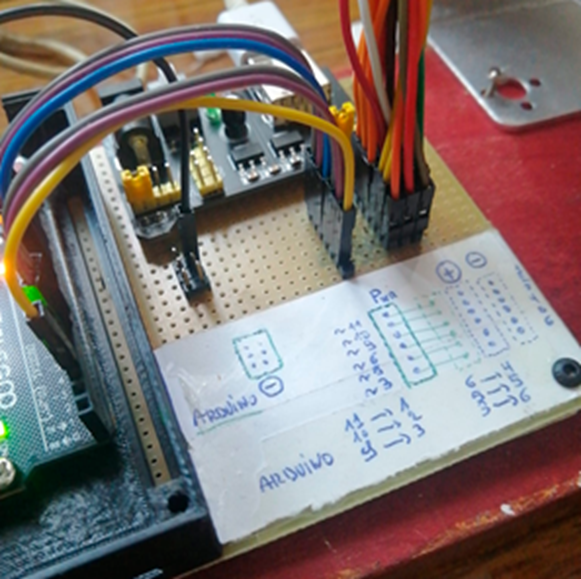
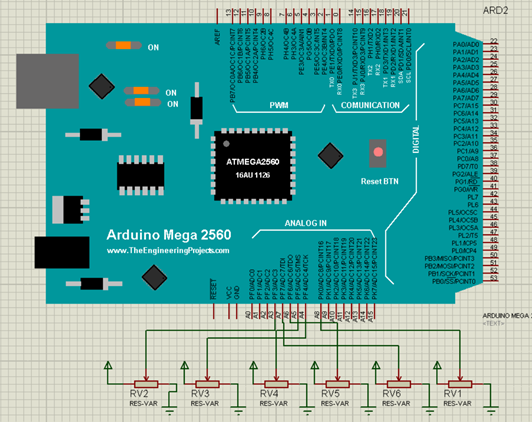
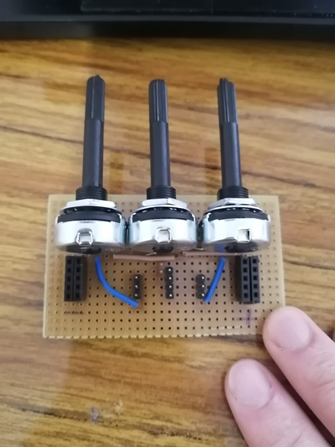
4.2. Estudiar las entradas y salidas En este paso, construimos un circuito de control que permite a transmitir datos a nuestra Nodo de ROS, Así pues, el circuito tiene seis potenciómetros de resistencia 1k que varía la señal entre 0 ° y180 °, Lo hacemos una simulación diagrama en ISIS.
Además, creamos un archivo que se acaba con .launch y construimos el script siguiente, Así pues, se ejecuta el ROS y llama a dos Nodos diferente al mismo tiempo y abre dos puertos seriales vincula con el maestro:
Paso1: Despues crear un pacakge ros sellama brazo_serial, despuies ejecutar el nodo de Arduino uno y mega con roslaunch archivo
$ roscd brazo_serial
$ roslaunch brazo_serial arduino.launch
Paso2:ejecutar la nudo de RPi
$ python arduino.python
Paso3:lista de topicos y nodos
$ rosnode list
$ rostopic list
Paso4:escuchar mensajes de resuesta
$ rostopic echo monitor_de_control
RPi: Raspberry Pi4