Version 1.0.0
YouTube -> https://youtu.be/c4uEohRcmfE
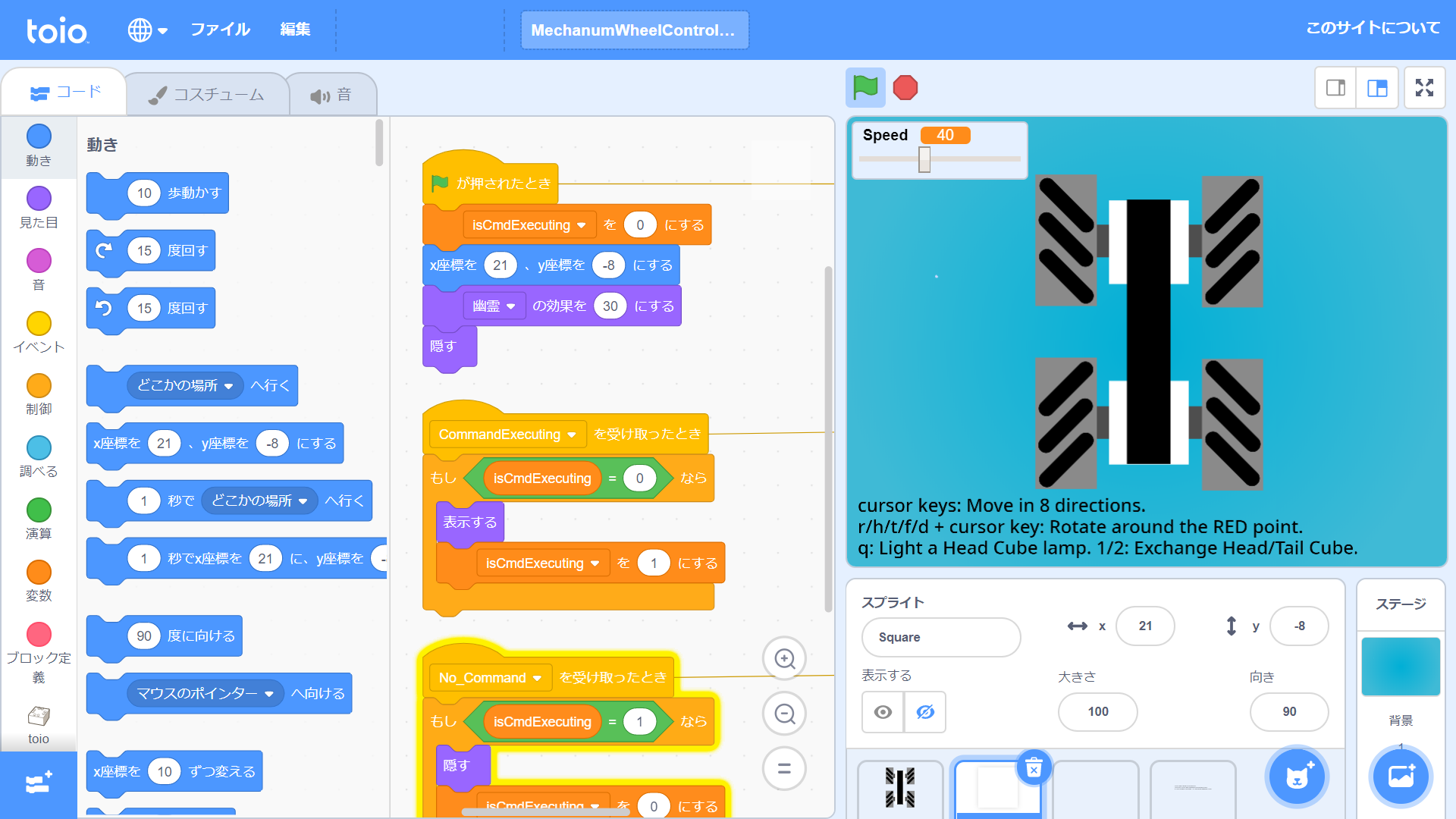
This is a tool that enables us to control an omni-directional mobile robot made by two toio™Core Cube and 4 mechanum wheels simultaneously.
It is implemented under toio™Visual Programming environment.
See this article in detail.
- Visit Developper version of toio™Visual Programming and open "MechanumWheelControlVisProg.sb3" download from this repository.
- Connect with 2 toio™Core Cubes. By using q key, we can light and check Head Cube. Also, we can exchange Head/Tail cubes by 1/2 keys.
- Press Green flag.
| Category | Operation | UI |
|---|---|---|
| Omni-direction move | 8 directions by ↑/↓/←/→ |
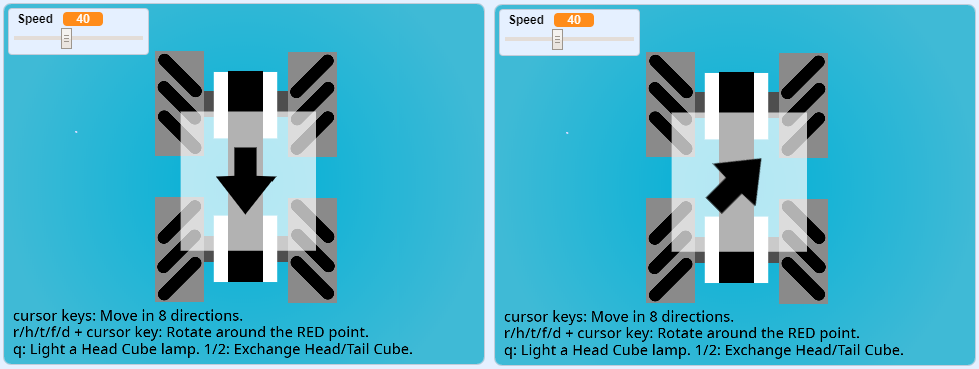 |
| Turn around center (red point) |
r + ←/→ | 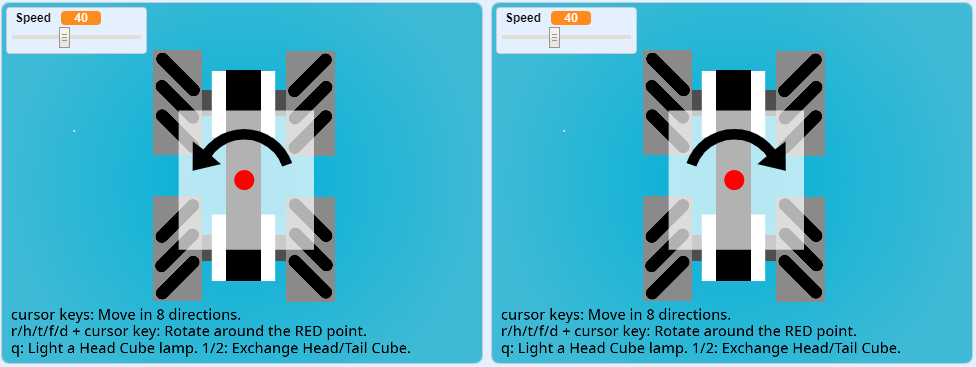 |
| Turn around Head/tail (red point) |
h/t + ←/→ | 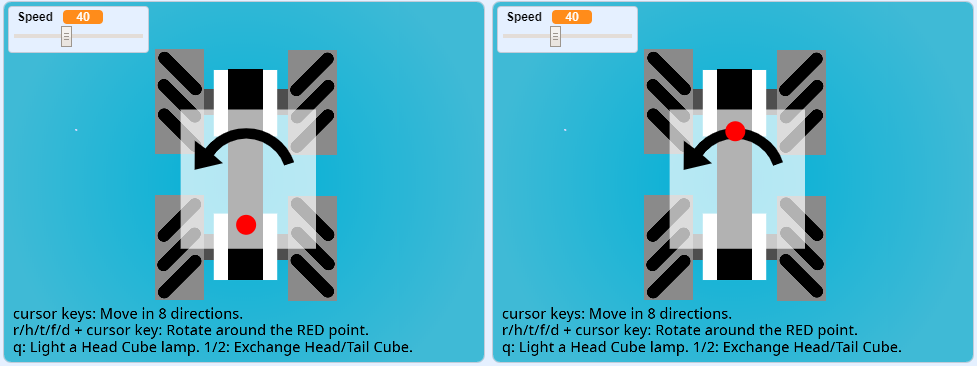 |
| Turn around l/r wheel (red point) |
d/f + ←/→ | 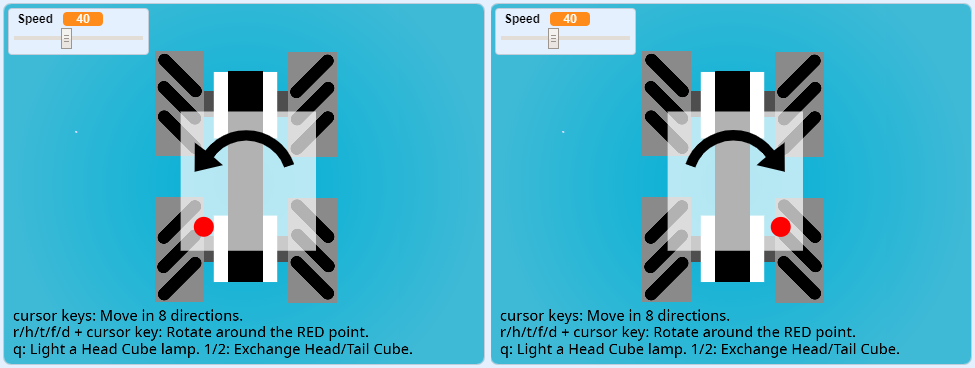 |
| Check Head | q key | Light Head Cube in white. |
| Exchange Head/Tail Cubes | 1/2 key | 1: Cube1 is Head. 2: Cube2 is Head. |
| Adjust speed | Slider |  Default value is 40. |
- Omni-directional move
- Twitter -> https://twitter.com/tetunori_lego/status/1210191833608769536
- YouTube -> https://youtu.be/c4uEohRcmfE
- Rotation in detail
- Twitter -> https://twitter.com/tetunori_lego/status/1210192042141184002
- YouTube -> https://youtu.be/LZZqrjRLbag
This software is released under the MIT License, see LICENSE.
Tetsunori NAKAYAMA.
toio™
https://toio.io/