An object oriented firmware design Template in c++ used for embedded systems. Currently support arduinos (Uno, Mega, Due...). The Concept can be ported for Esp family and other mcu that supports c++ and the standard library implementation.
- First Rule: Do not touch the main branch unless you are the author
- Second Rule: if you wish to contribute, create a derived branch from dev with your feature and name: dev_feature_name
- Third Rule: understand the graph below:

- Author: sami dhiab
Contact: sami@theion.de
The API doc is auto generated with doxygen. click docs, then Under Classes and Files you find the full API. If you make a fork from this repo, dont forget to run doxygen from inside docs/ after any changes made to src/ inc/ or.md files and push! even better run the script and it will takes care:
.\push #execute script push.batIn the configuration file you need to define all required parameters:
- PINS: pinout related to respective mcu
- MACROS: DEBUG, VIRTUAL ,RELEASE or TEST
- ENUMERATION: return values
To develop the firmware and test it in complete isolation from the hardware, a virtualisation platform is used called wokwi.
This provide a way to simulate a logic, algorithm or even some of the supported hardware (leds, sonar sensors, buttons, motors ...). Here is an example with arduino mega and connection with hardware.

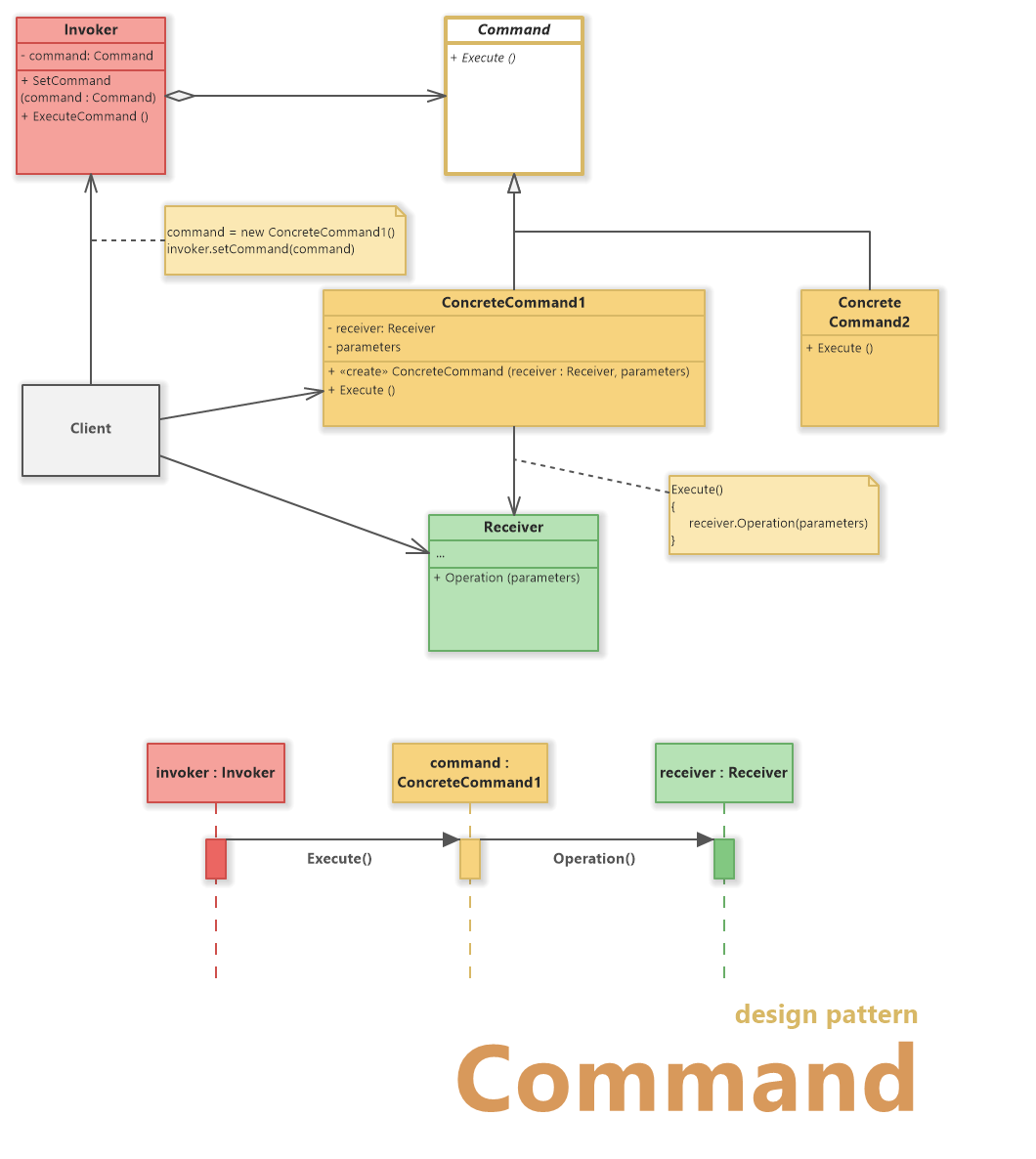
The Device or the mcu (SLave or listener) will wait for commands to parse from the server or master side. unless there are some background functions that run independantly from coming commands, the main task is to parse the commands. To be able to parse commands in a proper way, these commands must be defined inside classes, the receivers of commands are objects (sensors, actuators) that receive commands, invokers are entity that make indirect request via command to a receiver (internal controller ). The client is the app running. If we siimplify with an light switch example here:
- Receiver: Light
- Command: turnOn, TurnOff
- Invoker: light Switch

In many cases the master sending commands via Stream has to know the return of these Commands (if succes or fail) to process with next commands. Example of Commands and their return Value: retVal represents an enumeration that has ok=0 or err=1 which corresponds respectvly to succes and failure of that command.
| message | action | return value | return type |
|---|---|---|---|
| get uuid | get device uuid | uuid | String |
| get motor x direction | return motor x direction | direction | String |
| set motor y delay <value> | set motor y delay value to | null | retVal |
| move z up <value> | move up z to value | null | retVal |
| undo | execute last cmd | depends on last cmd | depends on last cmd |
| reset | reset device | null | void |
| sleep | sleep device | null | void |
It is up to to specify if <value> can int, float, double or any type ..
A demo value is coming soon..
Under UML folder are previous uml Diagrams.
Deprecated. see UML folder for previous uml Diagrams.
see UML folder for previous uml Diagrams.
please refer to test folder readme for tests and definitions. Unit tests are found under same folder. follow this link for more infos.
- implementing cmd design pattern
- implementing threading/scheduling tasks
- generating docsumentation fully with doxygen
- 03.06.2022: tested 2 libraries for tasks scheduling
- before 19.05.2022: see older branch (master branch for change log)
For upcoming version, ros will be fully supported.

- finish implementing scheduler
- finish docs for all files
Normally, commands are processed one after another (queue). To parallize commands, either commands callbacks must be non blocking or if blocking ( loops) then yield() must be injected inside loop. using yield() can pause current command and resume where it left.
- example: injecting yield() inside 2 loops:
void switchA()
{
static int idx=0;
for (idx=0; idx<100; idx++)
{
Serial.print("counter A: ");
Serial.println(idx);
Serial.println("switching contextA");
}
}
void switchB()
{
static int index=0;
for (index=0; index<100; index++)
{
Serial.print("counter B: ");
Serial.println(index);
Serial.println("switching contextB");
}
}
output:
counter A: 0
switching contextA
counter B: 0
switching contextB- Using scheduler/threading on one core mcu like arduino: like previous example, three scheduling libraries(task scheduling, arduino threads, AceRoutine) were tested to achieve this behavior. every library implementation has it own branch. All of these libraries provide a high level concept to organise tasks, to avoid using delay() or millis() for time handling and can switch context(yield) between tasks. The missing feature is the ability to add the context switching on top of the ready written code ( without modifying the existing code).