#!/usr/bin/env python
#Safir Mikhail 18.02.2021
import os
import json
import random
import time
import numpy
import math
import matplotlib.pyplot as plt
from IPython.display import clear_output
%matplotlib inline
class Settings:
devices = 10 # Number of devices in the simulation
signal_per_device_gain = 150
signal_per_device_zone = 100
end_x = 800
end_y = 800
settings = Settings()class Device:
device_id = 0
x = 0
y = 0
device_type = "mobile" #tower
in_zone = Falseclass Draw:
def draw_once(self, devices, graph_devices):
plt.figure(figsize=(10, 10))
fig = plt.gcf()
ax = fig.gca()
for i in range(0, len(devices)):
ax.add_artist(plt.Circle((devices[i].x, devices[i].y), settings.signal_per_device_zone, color='r', fill=False))
for i in range(0, len(devices)):
plt.plot(devices[i].x, devices[i].y, 'o', color="blue")
plt.text(devices[i].x, devices[i].y+25, str(devices[i].device_id), fontdict=None, horizontalalignment='center', verticalalignment='center')
for i in range(0, len(devices)):
if (graph_devices.get(devices[i]) is None):
pass
else:
for k in range(0, len(graph_devices.get(devices[i]))):
reach_device = graph_devices.get(devices[i])[k]
plt.plot([devices[i].x, reach_device.x], [devices[i].y, reach_device.y], 'ro-')
plt.plot(0, 0, 'o')
plt.plot(1000, 1000, 'o')
plt.title("Routing")
plt.grid(False)
plt.show();
def draw(self, devices, graph_devices):
clear_output(wait=True)
plt.figure(figsize=(10, 10))
fig = plt.gcf()
ax = fig.gca()
for i in range(0, len(devices)):
ax.add_artist(plt.Circle((devices[i].x, devices[i].y), settings.signal_per_device_zone, color='r', fill=False))
for i in range(0, len(devices)):
plt.plot(devices[i].x, devices[i].y, 'o', color="blue")
plt.text(devices[i].x, devices[i].y+25, str(devices[i].device_id), fontdict=None, horizontalalignment='center', verticalalignment='center')
for i in range(0, len(devices)):
if (graph_devices.get(devices[i]) is None):
pass
else:
for k in range(0, len(graph_devices.get(devices[i]))):
reach_device = graph_devices.get(devices[i])[k]
plt.plot([devices[i].x, reach_device.x], [devices[i].y, reach_device.y], 'ro-')
plt.plot(0, 0, 'o')
plt.plot(1000, 1000, 'o')
plt.title("Routing")
plt.grid(False)
plt.show();class Generator:
def collision(self, devices):
collision_main = {}
collision_main_device = {}
for i in range(0, len(devices)):
device_current = devices[i]
collision_array = [device_current.device_id, []]
collision_array_device = [device_current, []]
for j in range(0, len(devices)):
device_to_reach = devices[j]
if (device_current == device_to_reach):
continue;
distance = math.sqrt( ((int(device_current.x)-int(device_to_reach.x))**2)+((int(device_current.y)-int(device_to_reach.y))**2) )
if (distance < (settings.signal_per_device_zone * 2)):
collision_array_device[1].append(device_to_reach
)
collision_array[1].append(device_to_reach.device_id)
# print("device " + str(device_current.device_id) + " reached " + str(device_to_reach.device_id) + " with dis " + str(distance))
if (len(collision_array[1]) > 0):
collision_main[device_current.device_id] = collision_array[1]
collision_main_device[device_current] = collision_array_device[1]
return collision_main, collision_main_device
def walk(self, devices):
devices_new = []
for i in range(0, len(devices)):
x = devices[i].x
y = devices[i].y
n_x, n_y = random.randint(-15, 15), random.randint(-15, 15)
x += n_x
y += n_y
device = Device()
device.device_id = devices[i].device_id
device.x = x
device.y = y
devices_new.append(device)
return devices_new
def start(self):
devices = [] #Device array with classes
for i in range(0, settings.devices):
x, y = random.randint(100, settings.end_x), random.randint(100, settings.end_y)
device = Device()
device.device_id = i
device.x = x
device.y = y
devices.append(device)
return devices
passclass Router:
generator = Generator()
draw = Draw()
devices = []
graph = {}
graph_devices = {}
def build(self):
plt.ion()
self.devices = self.generator.start()
self.graph, self.graph_devices = self.generator.collision(self.devices)
print(self.graph)
self.draw.draw_once(self.devices, self.graph_devices)
# while True:
# self.devices = self.generator.walk(self.devices)
# self.graph, self.graph_devices = self.generator.collision(self.devices)
# # self.draw.draw_once(self.devices, self.graph_devices)
# self.draw.draw(self.devices, self.graph_devices)
# plt.pause(0.5)
pass
def start(self):
self.build()
passrouter = Router() # call public class
settings.devices = 10
settings.signal_per_device_zone = 100
router.start()
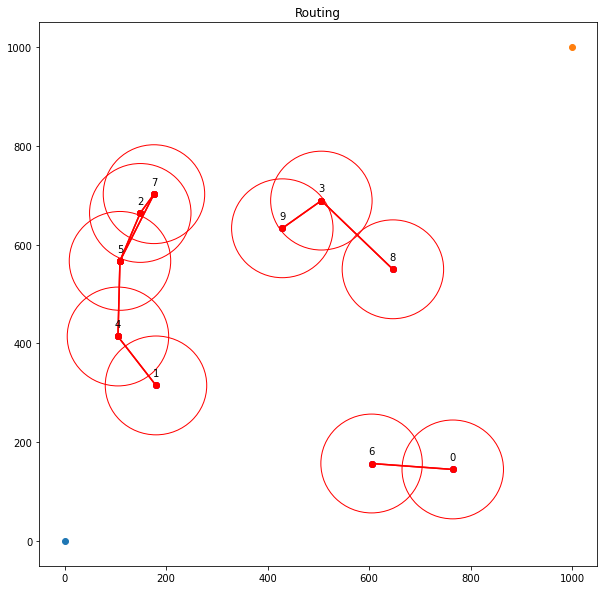
print(router.graph)
{0: [6], 1: [4], 2: [5, 7], 3: [8, 9], 4: [1, 5], 5: [2, 4, 7], 6: [0], 7: [2, 5], 8: [3], 9: [3]}
{0: [6], 1: [4], 2: [5, 7], 3: [8, 9], 4: [1, 5], 5: [2, 4, 7], 6: [0], 7: [2, 5], 8: [3], 9: [3]}
def dfs_paths(graph, start, goal):
stack = [(start, [start])] # (vertex, path)
while stack:
(vertex, path) = stack.pop()
for next in set(graph[vertex]) - set(path):
if next == goal:
yield path + [next]
else:
stack.append((next, path + [next]))print(list(dfs_paths(router.graph, 2, 1)))
router.graph.get(100) is None
[[2, 6, 4, 8, 1], [2, 6, 4, 8, 9, 7, 0, 5, 1], [2, 6, 4, 8, 9, 5, 1], [2, 6, 4, 8, 9, 0, 5, 1], [2, 6, 4, 8, 5, 1]]
True
