
Flutter Plugin inferring using d2go, the mobile model of detectron2.
- Get class and boundary box by object detection (Android and iOS)
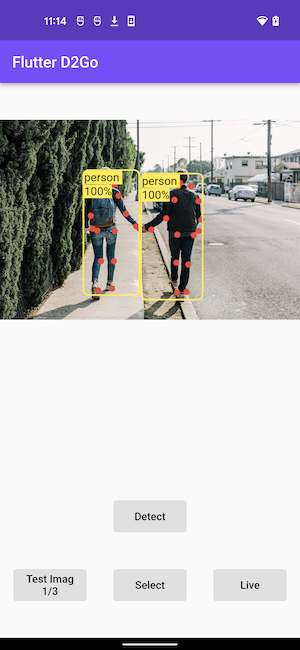
- Get keypoints by keypoint estimation (Android and iOS)
- Get mask data by instance segmentation (Android only)
- Live inference for camera stream images (Android only)
-
Live inference for camera stream images
-
Object detection and instance segmentation
-
Keypoints estimation




Add flutter_d2go to your pubspec.yaml.
Put the d2go model and class file in the assets directory.
assets:
- assets/models/d2go.pt
- assets/models/classes.txtThe model is in Pytorch format.
The format of classes file is here.
await FlutterD2go.loadModel(
modelPath: 'assets/models/d2go.pt', // required
labelPath: 'assets/models/classes.txt', // required
);List<Map<String, dynamic>> output = await FlutterD2go.getImagePrediction(
image: image, // required File(dart:io) image
width: 320, // defaults to 320
height: 320, // defaults to 320
mean: [0.0, 0.0, 0.0], // defaults to [0.0, 0.0, 0.0]
std: [1.0, 1.0, 1.0], // defaults to [1.0, 1.0, 1.0]
minScore: 0.7, // defaults to 0.5
);List<Map<String, dynamic>> output = await FlutterD2go.getStreamImagePrediction(
imageBytesList: cameraImage.planes.map((plane) => plane.bytes).toList(), // required List<Uint8List> image byte array
imageBytesPerPixel: cameraImage.planes.map((plane) => plane.bytesPerPixel).toList(), // default to [1, 2, 2]
width: cameraImage.width, // default to 720
height: cameraImage.height, // default to 1280
inputWidth: 320, // defaults to 320
inputHeight: 320, // defaults to 320
mean: [0.0, 0.0, 0.0], // defaults to [0.0, 0.0, 0.0]
std: [1.0, 1.0, 1.0], // defaults to [1.0, 1.0, 1.0]
minScore: 0.7, // default to 0.5
rotation: 90, // default to 0
);rect is the scale of the original image.
mask and keypoints depend on whether the d2go model has mask and keypoints.
mask will be a Uint8List of bitmap images bytes.
keypoints will be a list of 17 (x, y).
[
{
"rect": {
"left": 74.65713500976562,
"top": 76.94147491455078,
"right": 350.64324951171875,
"bottom": 323.0279846191406
},
"mask": [66, 77, 122, 0, 0, 0, 0, 0, 0, 0, 122, ...],
"keypoints": [[117.14504, 77.277405], [122.74037, 73.53044], [105.95437, 73.53044], ...],
"confidenceInClass": 0.985002338886261,
"detectedClass": "bicycle"
}, // For each instance
...
]Please contact here if you find any bugs or features you would like to add.