Feel free to reach out if you have questions about the project. This project involved designing a drone to perform object tracking with:
- a Pixhawk flight controller
- a RaspberryPi
- a custom servo-based camera gimbal
This project uses the MavLink protocol and OpenCV to allow object detection and tracking on a drone controlled by a pixhawk flight controller.
This project assumes that you already have a XXXX-copter configured using QGroundControl software which is able to fly using the stabilized flight mode
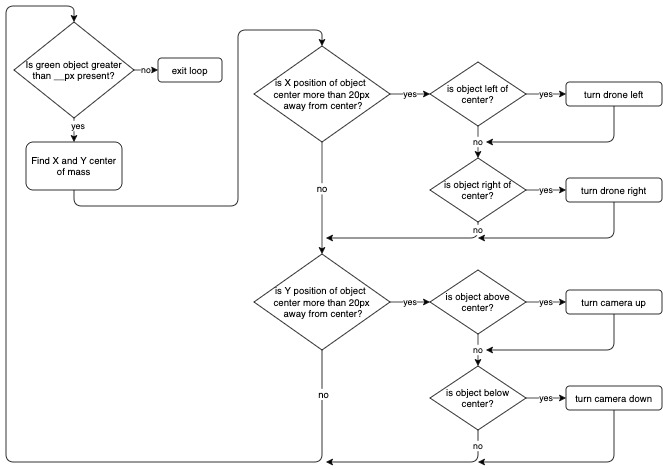
main_dat.py is the main program file that contains the mavlink initialization, main logic statements for switching between flight modes and other key componenets of the code. definitions.py contains the definitions for OpenCV, the individual mavlink commands etc. The control loop looks like the following: