-
In order to run SITL on your local machine, you will need to have Docker installed. For installation instructions, refer to the following:
-
You will also need to have MissionPlanner installed on your system. Refer to installation steps here.
-
Once you have Docker, you will need to pull the SITL image from DockerHub. To do this, run the Docker application then run the following command (where
X.X.Xis the desired ArduPilot version - this should match what is/will be running on the drone):- ArduPlane (VTOL):
- x86:
docker pull ubcuas/uasitl:plane-X.X.X - ARM64:
docker pull ubcuas/uasitl:plane-arm-X.X.X
- x86:
- ArduCopter (Quadcopter):
- x86:
docker pull ubcuas/uasitl:copter-X.X.X - ARM64:
docker pull ubcuas/uasitl:copter-arm-X.X.X
- x86:
If everything goes correctly, running
docker image lsshould contain an entry forubcuas/uasitl. - ArduPlane (VTOL):
-
Run one of the following commands to get SITL running. Refer to the documentation for more customization:
x86:
docker run --rm -d -p 5760:5760 --name acom-sitl ubcuas/uasitl:[plane/copter]-X.X.XARM64:
docker run --rm -d -p 5760:5760 --name acom-sitl ubcuas/uasitl:[plane/copter]-arm-X.X.X -
Next, open MissionPlanner. The first thing you will want to do is make sure that the dropdown in the top right of the UI is configured to
TCPas shown here:
-
Press the
ConnectButton to the right of that pane. You will be prompted with two inputs: one for hostname, and another for the remote port you want to use. Enter the following for each:- Hostname:
localhost - Remote Port:
5760
- Hostname:
-
If you have completed all of the above steps you should be ready to use SITL with MissionPlanner. If you see a drone show up on the map then you should be ready to go.

Note
MissionPlanner currently only works on Windows
-
Install required dependencies:
poetry install --no-root
-
Launch the application:
On Windows (Powershell)
poetry run python .\src\main.pyOn MacOS
poetry run python src/main.pyThe server will listen on the specified port (default 9000) for HTTP requests, and will use port 4000 to communicate with MissionPlanner.
-
Start the client inside MissionPlanner:
Navigate to the 'Scripts' tab and select
client.pyto run, the press 'Run Scripts' to start.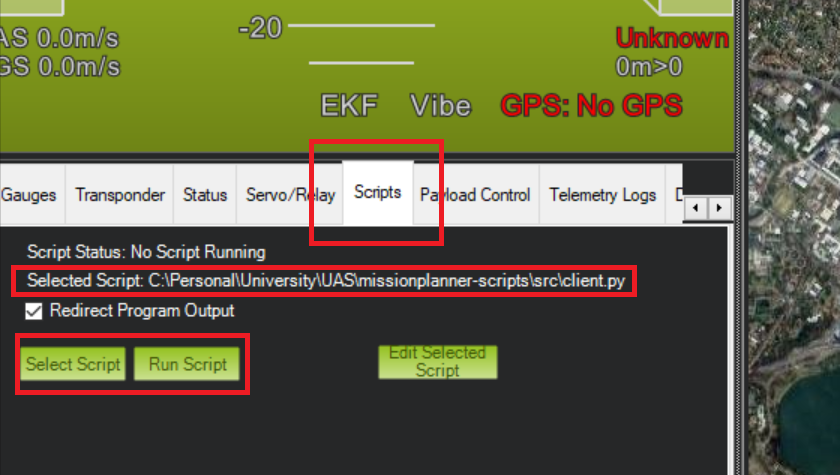

To run tests, you must have the Docker image running (uasitl:copter).
Then, enter the src directory and run the pytest command via Poetry:
cd src
poetry run pytest
Returns the remaining list of waypoints in the order provided by the queue. GCOM stores longitudes and latitudes internally, so we really only need the order of names of waypoints.
Waypoints that have been passed and removed from the queue, obviously, should not be displayed here either.
Altitude is measured relative to sea level.
Example response body:
[
{
"id": 1,
"name": "Alpha",
"longitude": 38.83731,
"latitude": -20.48321,
"altitude": 50.7
},
{
"id": 2,
"name": "Beta",
"longitude": 38.83731,
"latitude": -20.48321,
"altitude": 50.7
}
]POST request containing a list of waypoints with names and longitude, latitude, and altitude values. If altitude is nil, carry on with the same altitude as you had last waypoint.
Previous queue should be overwritten if there is already one in place.
Longitude, name, and latitude must not be null/empty. Returns a Bad Request status code and error message in that case. Longitude and latitude in degrees, altitude in meters.
Altitude is measured relative to sea level.
Return status code 200 if successfully POSTed.
Example request body:
[
{
"id": 1,
"name": "Alpha",
"longitude": 38.83731,
"latitude": -20.48321,
"altitude": 50.7
},
{
"id": 2,
"name": "Beta",
"longitude": 38.83731,
"latitude": -20.48321,
"altitude": null
}
]Call this endpoint to clear the current contents of the queue. The drone will no longer pursue the mission, as all waypoints have been removed.
An alternative to this endpoint is to call POST /queue with an empty queue as the body, since it overwrites the mission.
GET request returns the aircraft status. Velocity in m/s. Altitude in meters and is relative to sea level. Longitude, latitude, heading in degrees.
Example response:
{
"velocity": 22.2,
"longitude": 38.3182,
"latitude": 82.111,
"altitude": 28.1111,
"heading": 11.2,
"batteryvoltage": 1.5
}Stops the aircraft from moving based on the Mission Planner scripts' waypoint queue loading functionality, maintaining the queue internally. Return Bad Request if the aircraft is already locked, or the queue is empty.
It is still be possible to run (POST) /queue while the aircraft is locked.
This won't literally lock the aircraft either, i.e. we can still manually set waypoints with Mission Planner. This just pauses the loading functionality of the queue program. If currently moving toward a waypoint, stop moving toward it by removing it.
Resume moving the aircraft based on the currently stored queue. Returns a Bad Request status code and an error message if the aircraft is already unlocked.
POST request containing an altitude that is measured relative to sea level.
The altitude cannot be null. Returns a Bad Request status code and error message in that case. Altitude is in meters. Return status code 200 if successfully POSTed.
Example request body:
{
"altitude": 50.7
}Aircraft returns to home waypoint and lands (return-to-launch). Returns a Bad Request status code and error message if the drone could not execute the operation.
Aircraft stops at its current position and lands. Enters loiter mode before landing. Returns a Bad Request status code and error message if the drone could not execute the operation.
POST request containing a waypoint whose longitude, latitiude and altitiude will be the basis for the new home waypoint. All other fields will be ignored.
Longitude, latitude and altitude must not be null/empty. Returns a Bad Request status code and error message in that case.
Longitude and latitude in degrees. Altitude in meters and is relative to sea level. Return status code 200 if successfully POSTed.
Example request body:
{
"id": 1,
"name": "Alpha",
"longitude": 38.83731,
"latitude": -20.48321,
"altitude": 50.7
}This PUT request allows you to modify various settings for a drone:
- Flight Mode: Change the active flight mode by setting the
flight_modekey to one of the following:loiter,stabilize,auto, orguided. - Drone Type: Modify the drone configuration by setting the
drone_typekey to eithervtolorplane. - Altitude Reference: Update the altitude measurement standard by setting the
altitude_standardkey toAGL(Above Ground Level) orASL(Above Sea Level).
Each of these key-value pairs is optional; you can include any, all, or none of them in the JSON request body.
{
"flight_mode": "loiter",
"drone_type": "vtol",
"altitude_standard": "ASL"
}Inserts a new waypoint at the beginning of the queue. Drone should immediately head to this waypoint when the request is sent.
Example request body:
{
"id": 2,
"name": "Beta",
"longitude": 18.43731,
"latitude": -19.24251,
"altitude": 42.7
}A connection can be established through a Socket endpoint (set through command line argument, port 9001 by default). An example Node.js client has been provided in testing/socket.js that establishes a connection, and continually sends/recieves status information every 500ms.
The server is listening for the following events:
Socket client connects. Outputs to console to confirm connection.
Socket client disconnects. Outputs to console to confirm disconnection.
On recieving a message event, the server emits another message event in response, carrying a JSON containing basic drone status information. JSON Response template:
{
"velocity": 22.2,
"longitude": 38.3182,
"latitude": 82.111,
"altitude": 28.1111,
"heading": 11.2,
"batteryvoltage": 1.5
}We are using the Flask SocketIO library for our implementation. By default, the server pings the client every 25 seconds.