This repository releases code for our paper DeepPruner: Learning Efficient Stereo Matching via Differentiable PatchMatch.
DeepPruner
Differentiable Patch Match
Requirements (Major Dependencies)
Citation
-
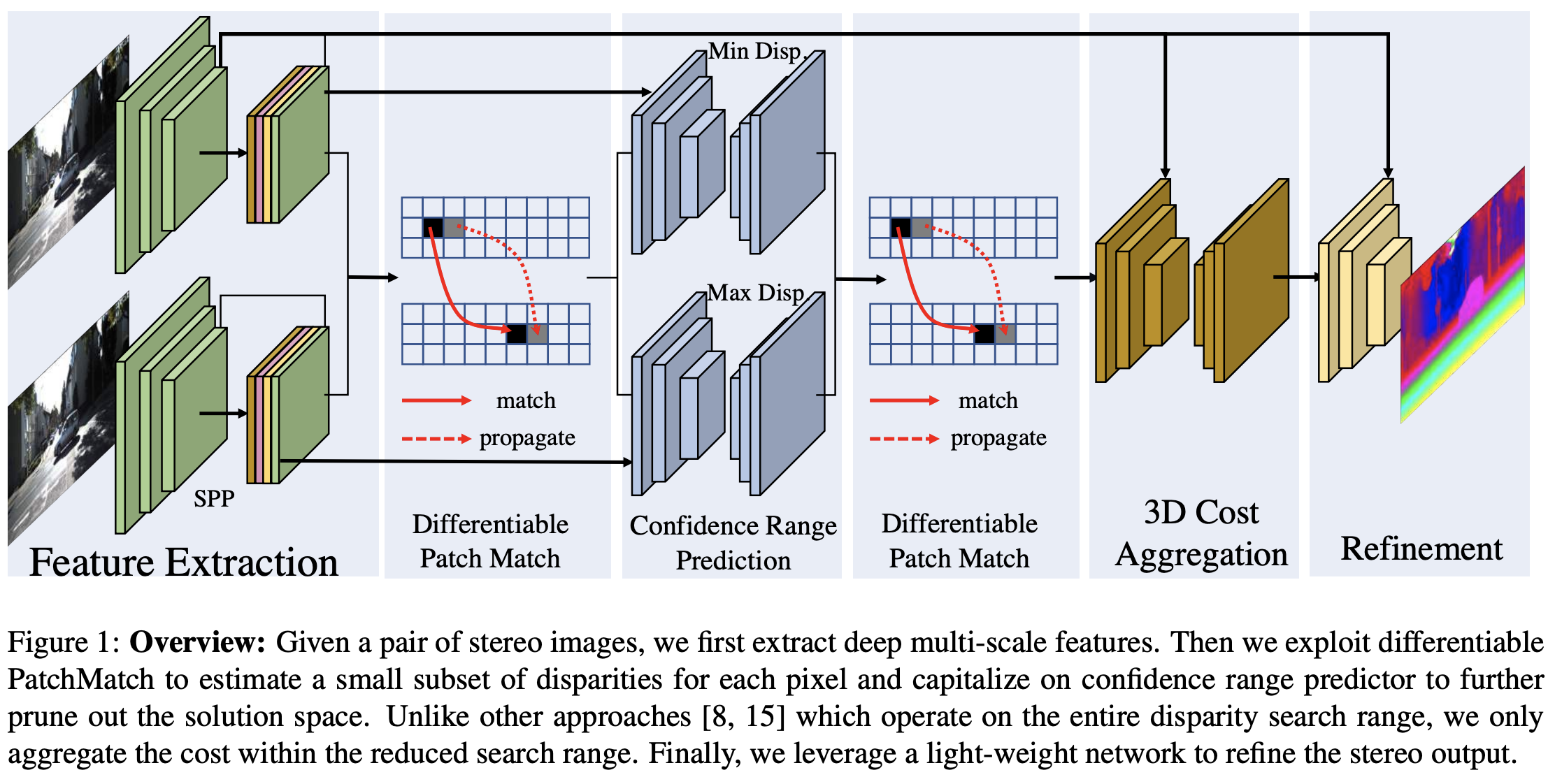
An efficient "Real Time Stereo Matching" algorithm, which takes as input 2 images and outputs a disparity (or depth) map.
-
Results/ Metrics:
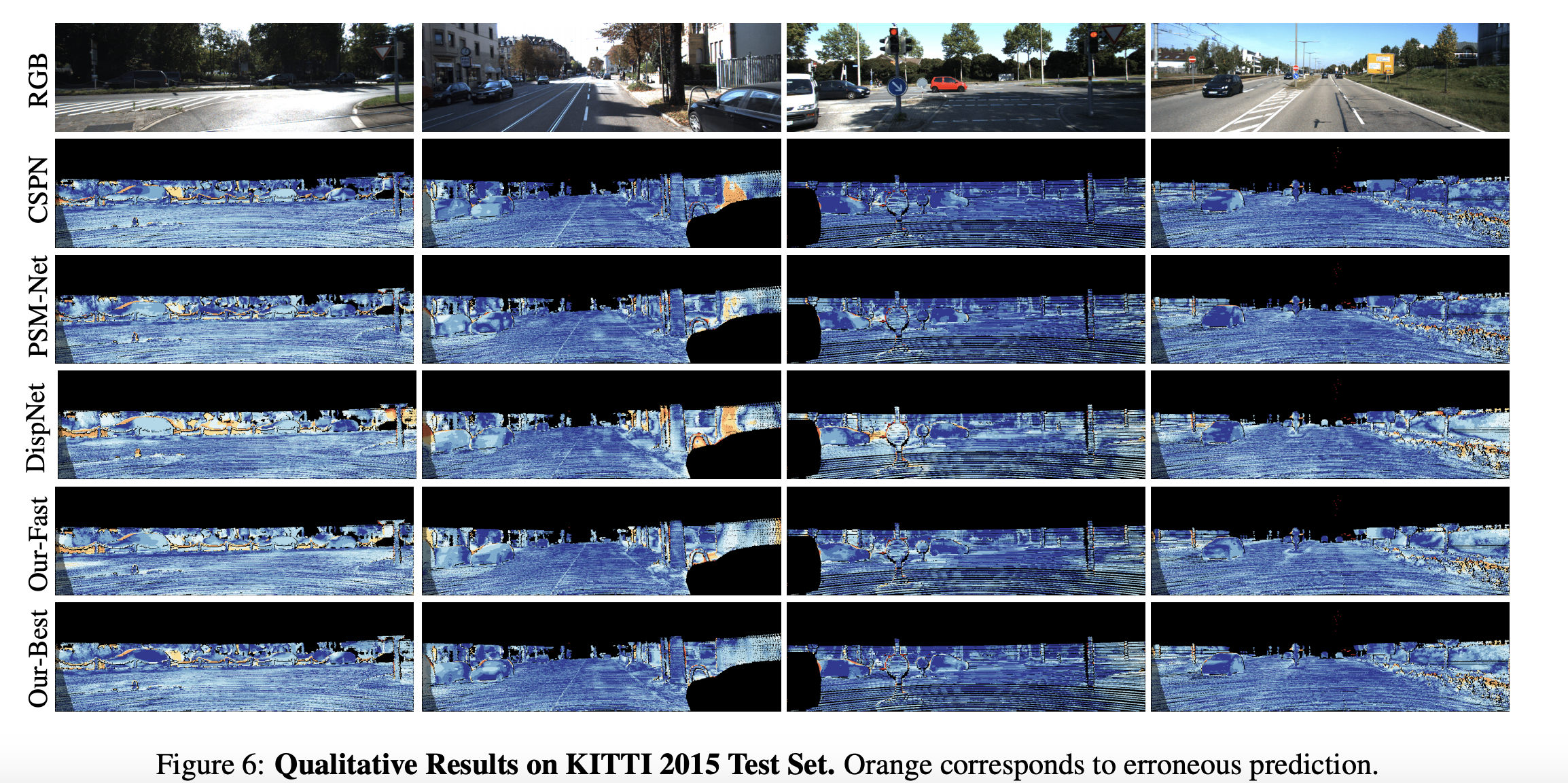
- KITTI: Results competitive to SOTA, while being real-time (8x faster than SOTA). SOTA among published real-time algorithms.
-
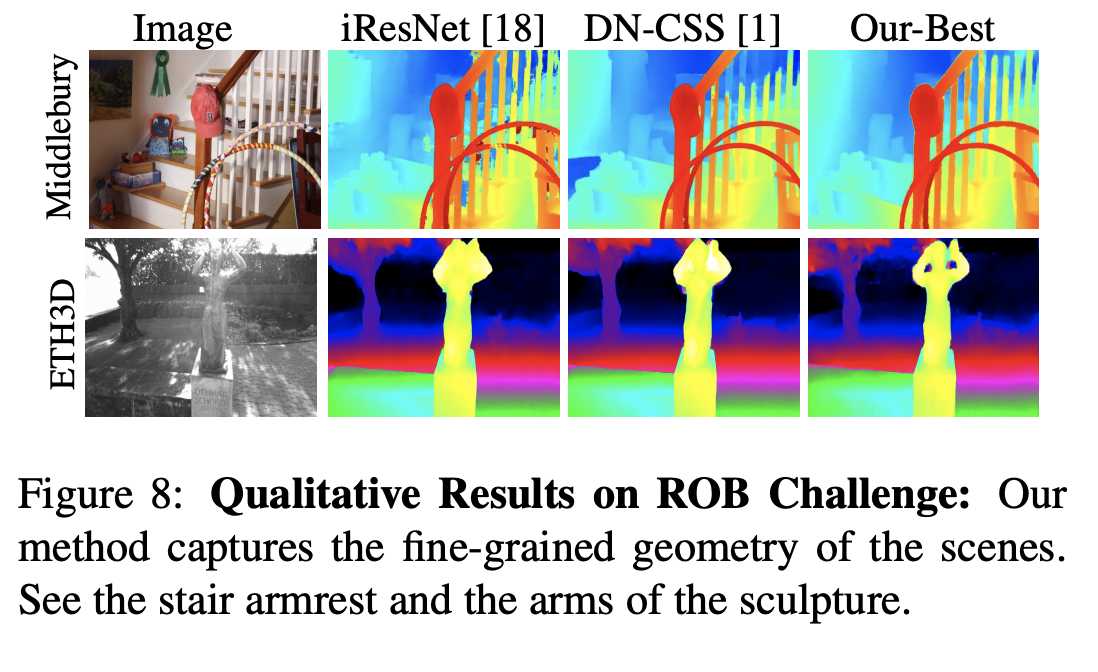
ETH3D: SOTA among all ROB entries.
-
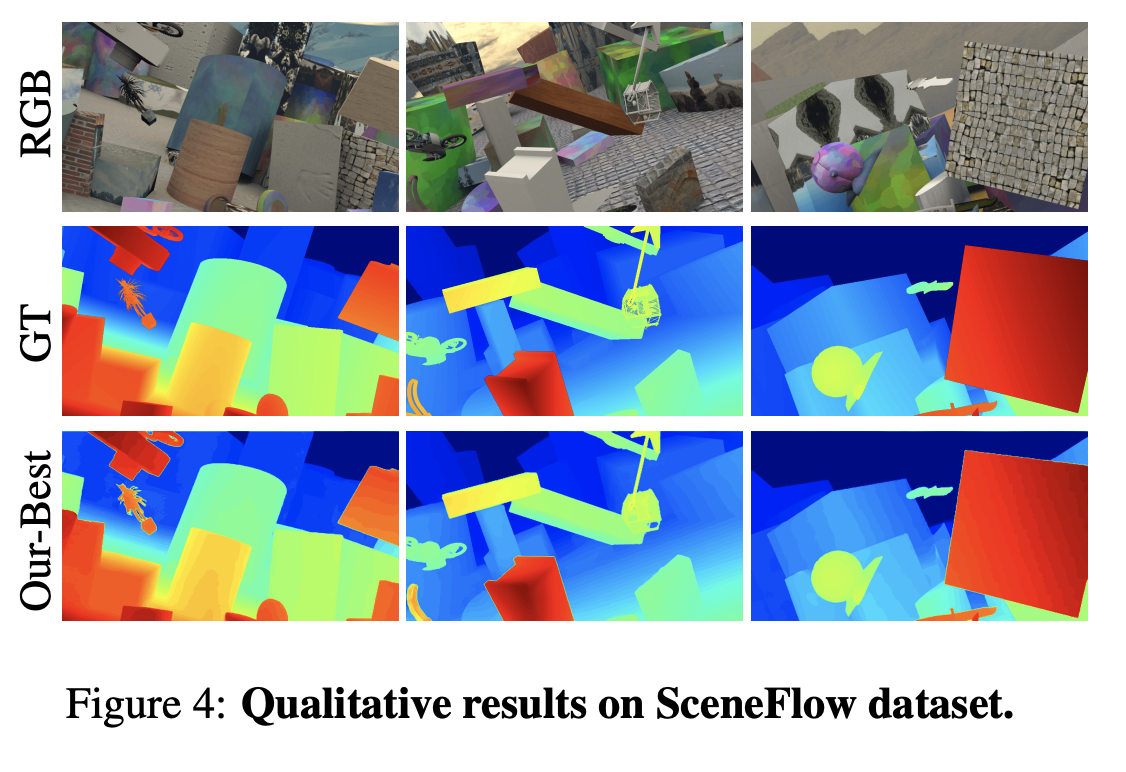
SceneFlow: 2nd among all published algorithms, while being 8x faster than the 1st.
- Robust Vision Challenge: Overall ranking 1st.
-
Runtime: 62ms (for DeepPruner-fast), 180ms (for DeepPruner-best)
-
Cuda Memory Requirements: 805MB (for DeepPruner-best)






- Fast algorithm for finding dense nearest neighbor correspondences between patches of images regions. Differentiable version of the generalized Patch Match algorithm. (Barnes et al.)


More details in the corresponding folder README.
- Pytorch (0.4.1+)
- Python2.7
- torchvision (0.2.0+)
If you use our source code, or our paper, please consider citing the following:
@inproceedings{Duggal2019ICCV,
title = {DeepPruner: Learning Efficient Stereo Matching via Differentiable PatchMatch},
author = {Shivam Duggal and Shenlong Wang and Wei-Chiu Ma and Rui Hu and Raquel Urtasun},
booktitle = {ICCV},
year = {2019} }
Correspondences to Shivam Duggal shivamduggal.9507@gmail.com, Shenlong Wang slwang@cs.toronto.edu, Wei-Chiu Ma weichium@mit.edu