This is a set of apps that demonstrate the Mongoose IMU library. This IMU library supports lots of gyroscope, accelerometer and magnetometer sensors commonly found on the market today.
The primary component is a Mongoose OS application (currently for ESP32) that
interfaces the IMU library and emits binary packets over serial console (which
is why mos console won't do much but print out garbage). The sensors are
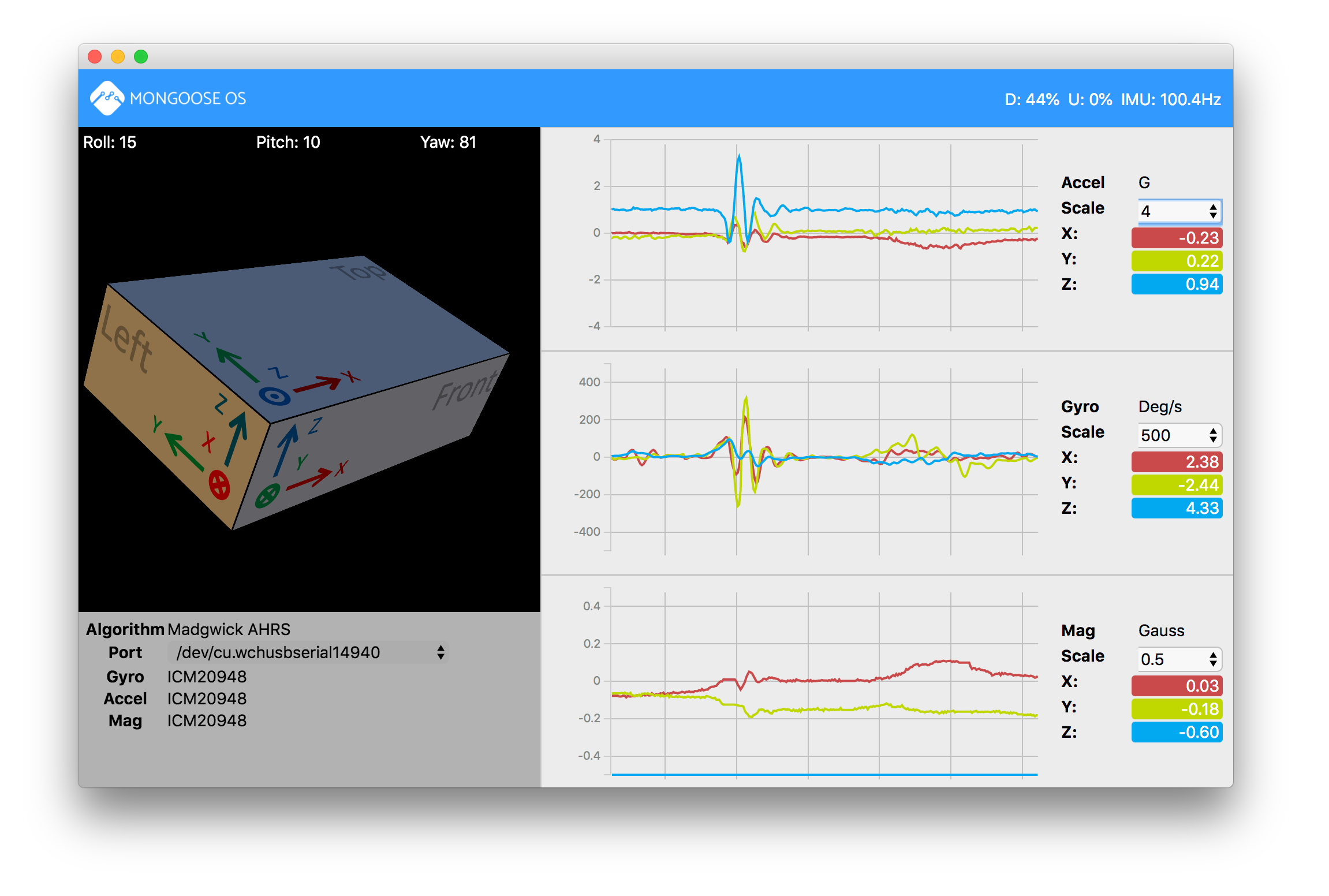
initialized and a Madgwick AHRS (attitude and heading reference system) is
started with an update frequency of 100Hz. The AHRS serves to fuse the data
from individual sensors:
- Accelerometer: measures the acceleration of the device in three directions,
typically
X,Y, andZaxes that are perpendicular to one another. One of these, typicallyZ, is being pulled towards earth and therefore measures grativy. Most accelerometers will have a range of between 2G and 16G. - Gyroscope: measures the angular rate, also in three axes. Most gyro's will have a range of between 250deg/sec and 2000deg/sec.
- Magnetometers: measures the earth's magnetic field through the device, also in three directions.
These sensors yield 9 values, which can be combined by an AHRS into a stable representation of the device's position in 3D space.
There's a simple console application based on ncurses which reads the raw
data in addition to the Quaternion that is computed by the microcontroller,
and derives the Roll, Pitch and Yaw just like an airplane would.

This more sophisticated Chrome Extension will draw the device in your browser including graphs of the sensor data and other goodies. It's used by the author of the IMU library mostly to validate correctness of new drivers.
This project is not an official Google project. It is not supported by Google and Google specifically disclaims all warranties as to its quality, merchantability, or fitness for a particular purpose.