- The Repository has all the processing done in the file Advanced Lane Lines Final A brief description of what was done has been described step by step.
- The outputs are Project Video , Challenge Video, Harder Challenge Video

- Calibrate - Use Camera Calibrate Function to get Distortion Matrix
- Undistort - Use Computed Distortion Matrix to correct for Distortion

- Warp - Use Warping Function to get Bird's eye view

- Threshold - Use a combination of static , dynamic thresholding with morph transformations & colorspaces to get thresholded image

-
Extract Pixel Information - Use Quantity based thresholding to and extract non-zero pixels
-
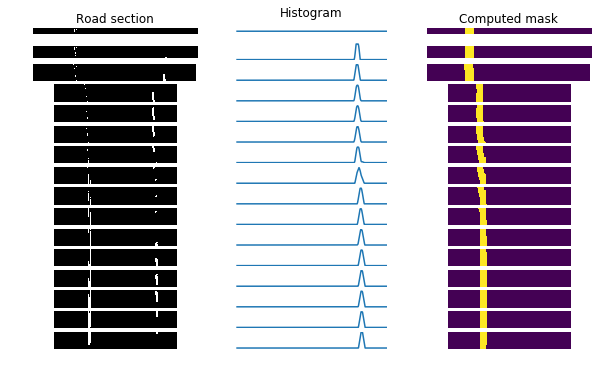
Blind Search - Look for pixel information throughout the image
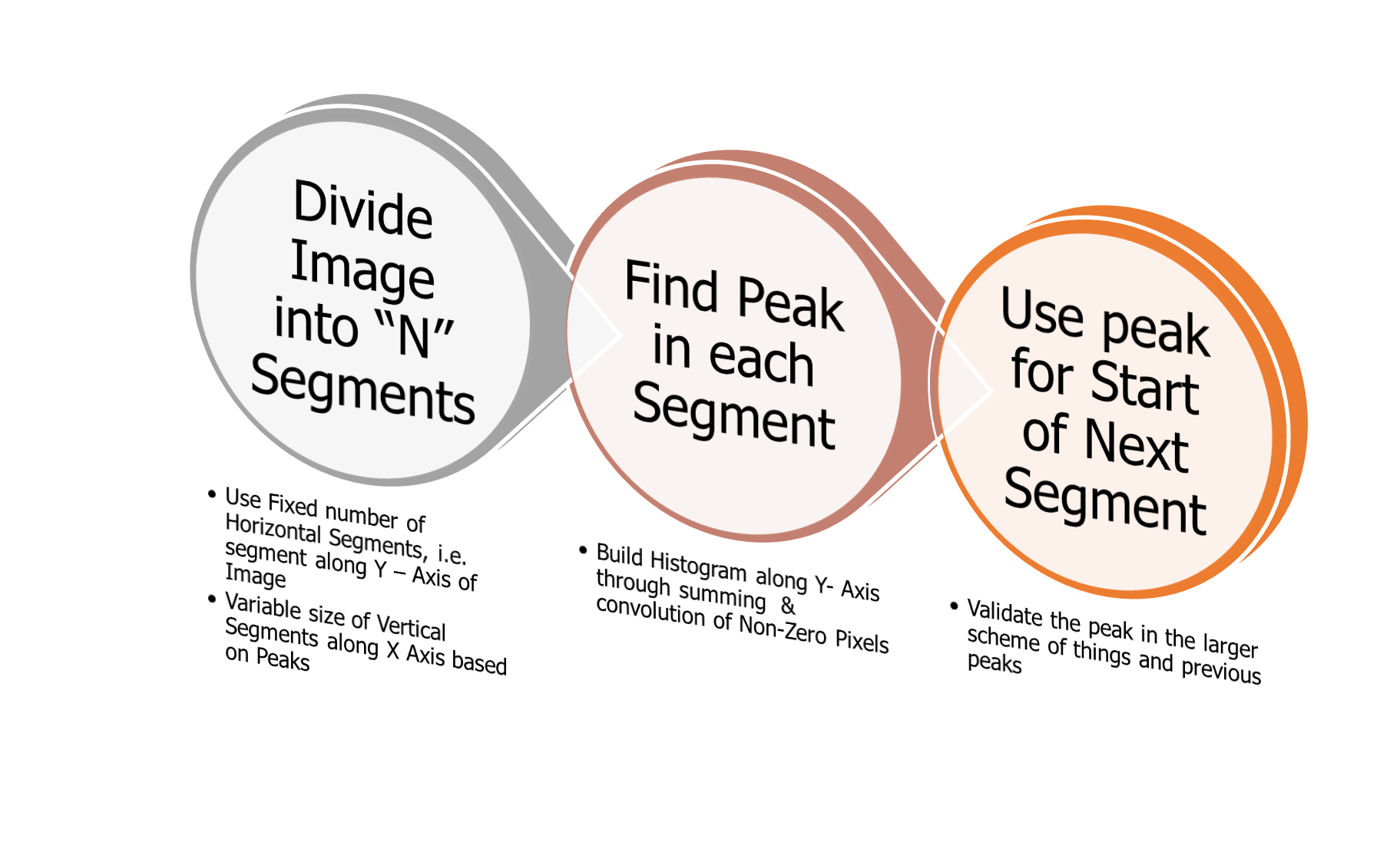
Left Mask Computation Right Mask Computation 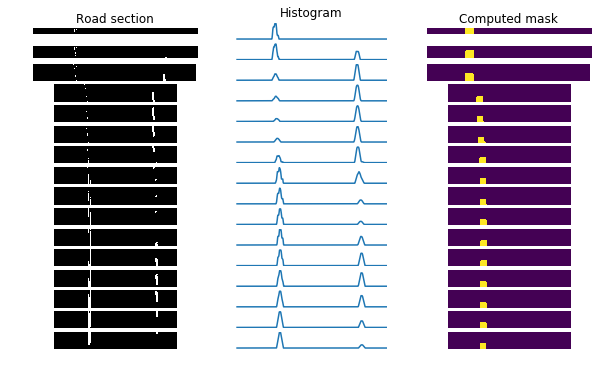
-
Polynomial Search

-
Validate and Fit - Use Curvature and LaneWidth Sanity mechanisms to check the validity of the two fits obtained for a given frame and decide on whether to use the current fit or use an extrapolated average of the previous fits






- Output - Return the processed frame.



- Get Chessboard Corners from Standard Images
- Calibrate Camera using differences in distances between expected and actual results
- Use Calibration data to Undistort Camera Images


- Use Interactive Python to plot and understand what is the best set of source and destination points for each/ all the three videos of interest. After several days of experimentation we have finally arived at these numbers
- Use Get Perspective Transform for Matrix calculation that can be used to Warp The Image to Bird's eye view and Unwarp them back to the front view


- Use B-Channel from the LAB Colorspace to choose Yellow and Shades of Yellow
- Use HLS Channel to filter out everything not in range of threshold. "


- Mean Fit : Get average fit over n-samples specified
- Predicted Fit: Extrapolate fit values if next sample is valid
- Last Fit: Last valid fit in the queue
- Mean Curvature : Get average curvature over n-samples specified
- Predicted Curvature: Extrapolate curvature values if next sample is valid
- Last Curvature: Last valid curvature in the queue
- Clear Queues: Clear the queues completely
- Pop Left: Pop the left most value in the queues



- Thresholding uses a combination of Morphological Transformations and Mean , Median , STDEV based dynamic thresholding
- Lane Width Rationalization and Dynamic Lane Width Updation to deal with optical illusion.
- State Machine to Handle decision on Found Lanes , and non-found lanes using queues and flags.
- Absence of a great road model, absence of a great camera model - The road model would help understand what sort of a curve is sane , what isnt . What colors amount to false positives etc. Similarly the camera model should be designed to dynamically shift field of view and calculate the x and y distances keeping optical illusions in mind.
- The result is extremely sensitive to Calibration ( Gains, Thresholds, Queue Lengths , Number of Segments etc.) Find the right combination of all these thresholds needed a plugin like Interactive Python .
- What works for one scenario may not work very well with the other. Using multiple scenarios for just the three videos would just amount to cheating, so developing a generic concept to handle most scenarios is the toughest part.
- These challenges made me appreciate the concepts of deep learning augmenting classic computer vision techniques to process the image mathematically.
- The entire project was built using global variables , queues and functions without the use of objects to make sure anyone who has just begun coding can read and understand the process easily.
The outputs of these Udacity students were taken as references to better my existing algorithms. Although I referred these algorithms I could manage to deliver my own touch to it and also better the results significantly when compared to the authors whose code I referred.
- Vivek Yadav - https://github.com/vxy10 ( Blind Search & Masking )
- Parilo - https://github.com/parilo ( Exploration of RANSAC Regressor Fit )
- Nikolas Ent - https://github.com/NikolasEnt ( Lane Width rationalization )
- Ajsmilutin - https://github.com/ajsmilutin ( Image Thresholding )