by : walkerchi
Notation
-
$x$ : state,$x\in\mathcal S = \mathcal S^+\cup{0}$ ,-
$x_0$ or$x(0)$ : initial state for discrete / continuous situation -
there are
$N_x$ distinct states for each time step -
$\tilde x$ tend to represent extend states like $\tilde x_k = \begin{bmatrix}x_k,y_k\end{bmatrix}^\top$
-
-
$w(t)$ : disturbance -
$u(t)$ : control input ,$u\in\mathcal U$ , there are$N_u$ distinct control inputs for each time step -
$\mu(t,x)$ : admissible control law (policy),$u(t)\sim \mu(t,x)$ -
$\pi$ : policy,$\pi^*$ optimal policy
-
-
$f(x,u)$ : system evolution- for continuous system:
$\dot x(\tau)=f(x(\tau),u(\tau))$ - for discrete system :
$x_{k+1}= f_k(x_k,u_k,w_k)$
- for continuous system:
-
$g_k(x,u)$ : cost for each step ,-
$g_N(x)$ is the cost for discrete terminal state -
$h(x)$ is the cost for continuous terminal state
-
-
$J(t,x)$ : cost function,$J^*$ optimal policy -
$N$ : time horizon -
$P_{ij}$ : probability of transition from state$i$ to state$j$ ,$\text{Pr}(x_{k+1}=j|x_k=i,u_k=\mu(i)) = P_{ij}(\mu(i))$ -
$q(i,u)$ : expectation of cost$q(i,u)=\underset{w|x=i,u=\text u}{\mathbb E}[g(x,u,w)]$ -
$p(t)$ : trajectory
Probability
-
$x\sim\mathcal N(\mu,\sigma^2)$ then$x^2\sim\mathcal N(\mu^2+\sigma^2, 2\sigma^4+4\mu^2\sigma^2)$ -
$x\sim \mathcal N(\mu, \sigma^2)$ then$Cx \sim \mathcal N(C\mu, C^2\sigma^2)$
Quadratic
-
$f'(x)=0\to x = -\frac{b}{2a}$ $f(x)|_{f'(x)=0} = -\frac{b^2}{4a}+c$
Laplace Transform
| time domain |
|
|---|---|
Dynamics $$ x_{k+1} = f_k(x_k,u_k,w_k)\ \dot x = f(x,u,w) $$ Cost $$ J_\pi = \mathbb E\left[g_N + \sum_{k=0}^{N-1}g_k(x_k,u_k,w_k)\right] $$
- $J^\pi$ : optimal cost $J\pi^ = \text{max}~J_\pi$
Open Loop : control inputs are determined at beginning
- expected cost
-
Number of Open Loop Strategies :
$N_u^N$ all the possible path from start to end
Closed Loop :
- expected cost
-
Number of Close Loop Strategies :
$N_u(N_u^{N_x})^{N-1}$ (number of state stay constant) or$N_u^{\sum_k N_x^k}$ all possible path for unique set of all reachable states$\sum_k N_x^k$
Open Loop vs Closed Loop
- open loop is special case of closed loop
- open never performs better than closed loop
- for deterministic problem , closed loop is not efficient as open loop
-
Number of Minimizations : number of reachable states
$\sum_k N_x^k$ - when there is no disturbance
$w_k$ , it can be solved by forward DPA
general state :
Example :
Infinite Horizon Problems :
-
Recursion $$ J_k(\text x) = \underset{\text u\in\mathcal U(\text x)}{\text{min}} \underset{(w|x=\text x, u=\text u)}{\mathbb E}\left[g(x,u,w)+J_{k+1}(f(x,u,w))\right]\quad J_N(\text x) = g_N(\text x) $$
-
$N\to\infin$ it becomes BE, if$J_N$ converge, then$J(x)=J^*(x)$
$$ J^(x) = \underset{u\in\mathcal U(x)}{\text{min}}\underset{(w|x=\text x,u=\text u)}{\mathbb E}[g(x,u,w)+J^(f(x,u,w))] $$ $$ V^(x) = \underset{u\in \mathcal U}{\text{min/max}}\left[r(x,u) + \alpha\sum_{x'} P_{x,x'}(u)V(x')\right] $$
- convergence of IHP
[SSP]Stochastic Shortest Path : the transition from state
-
$P_{ij}$ is time-invariant,$P_{ij}\ge0$ - cost-free terminal state
$P_{00}(\text u)=1$ and$g(0,\text u,0)=0$ $\forall \text u\in \mathcal U(0)$ - In the terminal state, any admissible control action is optimal
[VI] Value Iteration $$ V_{l+1}(i) = \underset{\text u\in \mathcal U(i)}{\text{min}}\left(q(i,u) + \alpha\sum_{j=1}^n P_{ij}(\text u)V_l(j)\right) $$
-
infinite number of iteration to converge to optimum
$J^*$ , when to stop : threshold for$\Vert V_{l+1}(i) - V_l(i)\Vert$ -
complexity :
$\mathcal O(n^2p)$ ,$n$ is the number of states,$p$ is the possible control inputs -
synchronous update $$ V_{l+1}(i) = \underset{\text u\in \mathcal U(i)}{\text{min}}\left(q(i,u) + \alpha\sum_{j=1}^n P_{ij}(\text u)V_l(j)\right) $$
for i in range(n): V_[i] = (q[i] + P[i] @ V).max(axis=u_axis) V[:] = V_ -
Gauss-Seidel Update asynchronous update $$ V_{l}(i) = \underset{\text u\in \mathcal U(i)}{\text{min}}\left(q(i,u) + \alpha\sum_{j=1}^n P_{ij}(\text u)V_l(j)\right) $$
for i in range(n): V[i] = (q[i] + P[i] @ V).max(axis=u_axis)
[PI] Policy Iteration
-
Value Update: $$ V_{l+1}(i) = q(i,u) + \alpha\sum_{j=1}^n P_{ij}(\text u)V_l(j) $$
- complexity :
$\mathcal O(n^3)$ ,$n$ is the number of states, solve linear system
- complexity :
-
Policy Improvement: $$ \mu^{l+1}(i) = \underset{\text u\in \mathcal U(i)}{\text{argmin}}\left(q(i,u) + \alpha \sum_{j=1}^n P_{ij}(u) V_{l+1}(j)\right) $$
- complexity :
$\mathcal O(n^2p)$ ,$n$ is the number of states,$p$ is the possible control inputs
- complexity :
-
cost-free terminal state and proper policy (
$J_\pi(i)\neq\infin$ , every state could reach$0$ ), PI converges to optimum after a finite number of steps -
Asynchronous PI
- any number of value updates in between policy updates
- any number of states updated at each value update
- any number of states updated at each policy update
-
converge to the same optimal cost as VI if the solution is unique
-
has unique solution
$\Leftrightarrow$ $I-P$ invertible$\Leftrightarrow$ remove terminal state$0$ $S\to S^+$ -
discounted problem can arbitrary initialized
-
discounted problem
$I-\alpha P$ always invertible -
values of each state at each iteration should decrease of remain the same.
[LP]Linear Programming : used to solve the BE and yields optimal cost V(i)\le\left(q(i,\text u) + \alpha \sum_{j=1}^nP_{ij}(\text u)V(j)\right)\forall \text u \in \mathcal U(i),\forall i\in \mathcal S^+
$$
- to transform to form $\begin{aligned}&\text{min}
\textbf f^\top\textbf x\ &\text{sub}\textbf A\textbf x\le \textbf b\end{aligned}$- $\textbf A = -\begin{bmatrix}\mathbb I - \alpha P_{u_1}\ \vdots \\mathbb I - \alpha P_{u_{N_u}}\end{bmatrix}$ where $P_{u_i} =\begin{bmatrix}P_{11}(u_i)&\cdots&P_{1N_x}(u_i)\\vdots &\ddots & \vdots\P_{N_x1}(u_i)&\cdots&P_{N_xN_x}(u_i)\end{bmatrix}$
- $\textbf b = -\begin{bmatrix}\textbf b_{u_1}\\vdots\\textbf b_{u_{N_u}}\end{bmatrix}$ where $\textbf b_{u_{N_i}}=\begin{bmatrix}r(1,u_i)\\vdots\r(N_x,u_i)\end{bmatrix}$
- minimize problem
$\textbf f = -\textbf 1$ , maximize problem$\textbf f=1$
Discounted Problem : decay exponentially $$ \tilde J_{\tilde \pi}(i) = \underset{(\tilde X_1,\tilde W_0|\tilde x_0=i)}{\mathbb E}\left[\sum_{k=0}^{N-1}\alpha^k\tilde g(\tilde x_k,\tilde u_k,\tilde w_k)\right] $$
- finite steps
- arbitrary initial
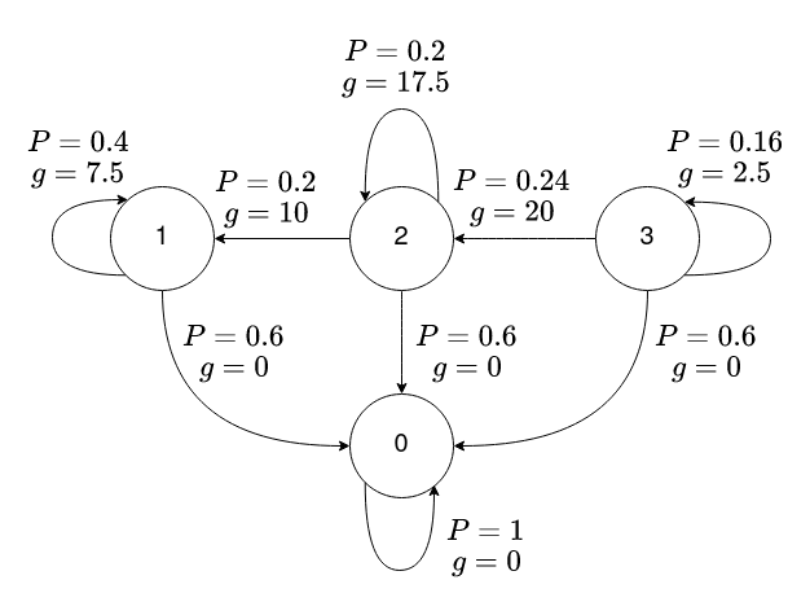
Auxiliary Stochastic Shortest Path : equivalent Discounted Problem
Dynamics : $$ \begin{aligned} p_{w|x,u}(j|i,u) &= \alpha \tilde P_{ij}(u) \ p_{w|x,u}(0|i,u) &= 1-\alpha \ p_{w|x,u}(j|0,u) &= 1 \ p_{w|x,u}(0|0,u) &= 1 \end{aligned} $$
Cost :
-
one to one mapping to discounted problem
-
Example : given discount factor
$\alpha=0.4$ 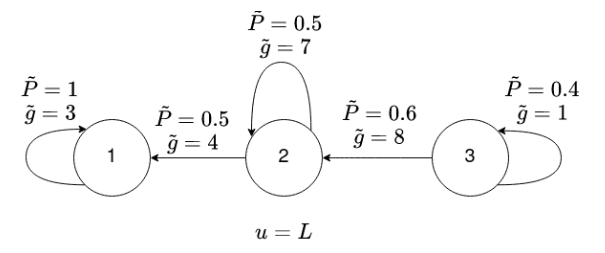


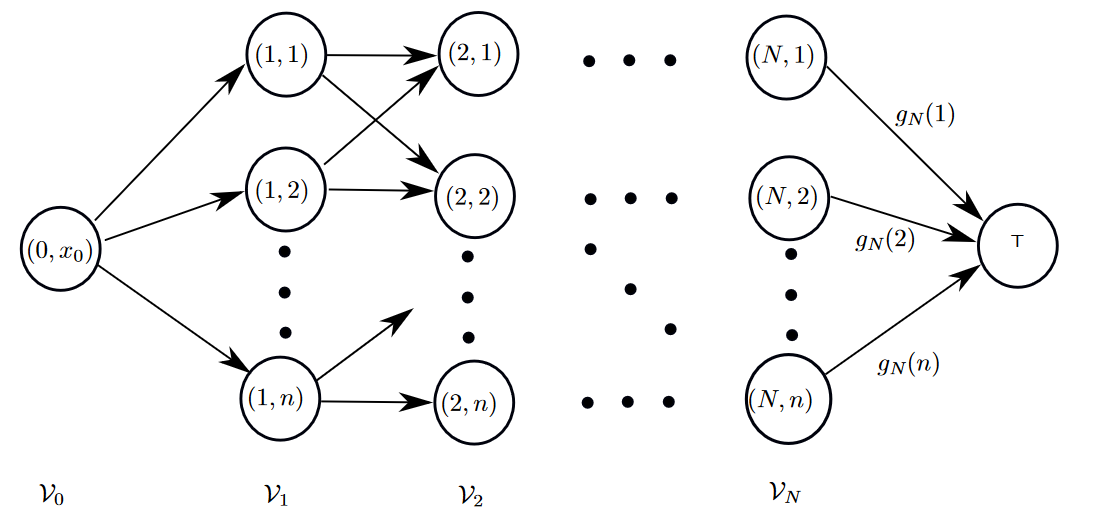
[DFS] Deterministic Finite State Problem :
$$
x_{k+1} = f_k(x_k,u_k)\
J=g_N(x_N) + \sum_{k=0}^{N-1}g_k(x_k,u_k)
$$
[SP] Shortest Path : in a graph, find a path from node
-
symmetric : forward DPA and backward DPA are the same for this problem
-
no negative cycles :
$\forall i\in\mathcal V, Q\in \mathcal Q_{i,i},J_Q\ge 0$ , if negative, there will exist infinite loop -
$N\le|\mathcal V|-1$ -
DFS to SP
-
why it can be solved by forward DPA (
$J_k\gets J_{k+1}$ )? it's deterministic -
why it can be solved by backward DPA (
$J_k\gets J_{k-1}$ )? it can be converted to a deterministic DP problem.

[HMM]Hidden Markov Model :
- measurement model :
$z$ is measure in transition from$i$ to$j$
Viterbi Algorithm : Given measured sequence
- DPA can be applied to already solve for the most likely state trajectory up until now.
- Future measurements can change the most likely trajectory for pasttime steps
[LCA]Label Correcting Algorithm
-
$s\to \text{OPEN}$ , set$d_s=0,d_j=\infin~\forall j\in \mathcal V/{s}$ $\text{OPEN}\rightarrow{i}\cup\text{OPEN}$ -
$\forall j\in \mathcal N_i$ if $(d_i+c_{ij})<d_j $ and$(d_i+c_{ij})<d_{t}$ ,$d_j\gets d_i+c_{i,j}$ ,$j.\text{parent} \gets i$ ; if$j\neq t$ ,$\text{OPEN}\gets\text{OPEN}\cup{j}$ -
$|\text{OPEN}| > 0$ goto 2
# step 0, s is the initial seed
open_set = [s]
d = np.fill([n], np.inf)
d[s] = 0
while len(open_set) > 0:
# step 1 visit node in open set
i = open_set.pop()
for j in i.children:
# step2 update the distance of j
# d[i]+c[i,j]+h[j] < dt -> A-star
# h:positive lower bound get from node j to T
if d[i]+c[i,j] < d[j] and (d[i]+c[i,j]) <dT:
d[j] = d[i] + c[i,j]
j.parent = i
if not j is T:
open_set.append(j)-
Search Order :
-
Breadth-first
-
Depth-first
-
Best-first:
$d_i$ the smallest nearest first
-
-
Dijkstra's Algorithm :
$d_i$ best-first -
A
$^\star$ :$d_i+h_i$ best-first, where$h_i=\underset{k\in\mathcal V/{j}}{\text{min}}c_{jk}$
$$ 0 = \underset{u\in\mathcal U}{\text{min}}\left(g(\text x,u) + \frac{\partial J^(t,\text x)}{\partial t} + \frac{\partial J^(t,\text x)}{\partial \text x}f(\text x,\text u)\right) $$
where
Pontryagin's Minimum Principle : $$ \begin{aligned} H(\text x, \text u,\text p) &= g(\text x, \text u)+ \text p^\top f(\text x,\text u) \ \dot p(t) &= -\left.\frac{\partial H(\text x, \text u, \text p)}{\partial \text x}\right|^\top_{\begin{matrix}x(t)\u(t)\p(t)\end{matrix}} \ p(T) &= \left.\frac{\partial h(\text x)}{\partial\text x}\right|^\top_{x(T)} \ u(t) &= \underset{\text u\in \mathcal U}{\text{argmin}}H(x(t),\text u,p(t)) \ \dot x(t) &= f(x(t),u(t)) \end{aligned} $$
-
necessary condition for optimal cost
-
Bang-Bang Control :
$u\in {a,b}$ - Example :
$\ddot x = u, a<0<b$ , normally $u=\begin{cases}b & t\in[0,t]\a&t\in[t,T]\end{cases}$
- Example :
-
minimize total time
$T$ :$g(\text x,\text u) = 1$ , since$T=\int_0^T 1\text d\tau$
optimal trajectory $$ H(x(t),u(t),p(t)) = -\left.\frac{\partial J(t,x)}{\partial t}\right|_{x(t)} = \text{constant} $$