ur5e_simulation
System: Ubuntu 18.04, Ubuntu 20.04
ROS: Melodic, Noetic
Moveit
Gazebo
For some dependencies were missed for the project, please check the following instructions.
sudo apt-get install ros-melodic-moveit-visual-tools
sudo apt-get install ros-melodic-ros-controllers
Furthermore, one more gripper plugin was needed for the project.
cd <home>
git clone https://github.com/wangarcher/plugins.git
cd roboticsgroup_gazebo_plugins
mkdir build && cd build
cmake ..
make
PLEASE BE ADVISED!The following command would directly write a new .so lib into the system lib folder. It's effective, but a little bit dangerous.
sudo cp devel/lib/libroboticsgroup_gazebo_mimic_joint_plugin.so /usr/lib/x86_64-linux-gnu/<gazebo-9>or<gazebo-11>/plugins/
**NOTE:**There might be more dependencies needed due to vairous reasons. If you found any, please let me know.(archer7wang@outlook.com)
Like ordinary ros projects, the simluation needs a clean workspace.
mkdir -p ur5e_sim_ws/src
cd src
git clone https://github.com/wangarcher/ur5e_simulation.git
cd ..
catkin_make
source devel/setup.bash
To initialize the ur5e_simluation
roslaunch sim_bringup with_moveit_new.launch
To run the demo visual-planning
roslaunch sim_general_planning x_arm_planning.launch
To run the cartesian pid control
roslaunch sim_general_planning unity.launch
Find a reasonable manipulation path through tons of object poses.
roslaunch sim_general_planning twelve_monkeys.launch
The method is simple.
- Assume there is ellipse which focus on the start and end poses.
- Find k nearest object poses.
- Rank them according to the distance to the start and end poses.
- Done
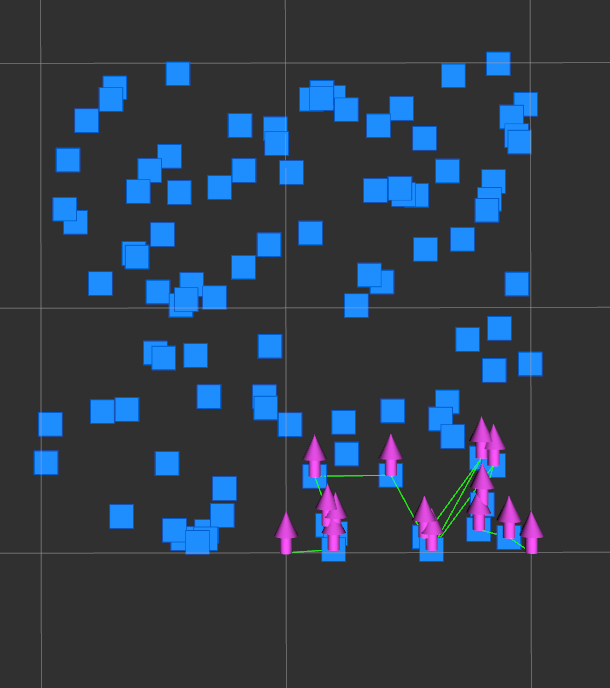
Result
- Bule point: object poses
- Pink arrow: Manipulation pose
- Green Path: Manipulation path

An alternative choise
roslaunch sim_general_planning hex_love.launch
The method is simple, too.
K-means.
Result
