


embARC CLI is the name of the embARC command-line tool, packaged as embarc_tools. embARC CLI support for embARC application creation, build and config, use of the embARC Open Software Platform.
This document covers the installations and usage of embARC CLI.
The basic workflow for embARC CLI is to:
- Create an application.
- Config the application.
- Build the application code.
Tip: To list all embARC CLI commands, use embarc --help. A detailed command-specific help is available by using embarc <command> --help.
$ embarc -h
usage: embarc [-h] [--version] ...
Command-line tool for embARC OSP - https://embarc.org/embarc_osp
version 1.0.4
Use "embarc <command> -h|--help" for detailed help.
Online manual and guide available at https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_tools
optional arguments:
-h, --help show this help message and exit
--version Display version
Commands:
new Create a new application
build Build application
appconfig Get or set application config
config Get, set or unset configuration options.
Windows and Linux support for embARC CLI.
- Python - embARC CLI is a Python script, so you'll need Python to use it. We test embARC CLI with version 2.7.11 of Python and version 3.6.0 of Python
You can get the lastest stable version of embARC CLI through pip by running:
$ pip install embarc-cli
Alternatively, you can get the development version of embARC CLI by cloning the development repository:
$ git clone https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_tools.git
Once cloned, you can install embARC CLI as a Python package:
$ python setup.py build
$ python setup.py install
To update an existing installation of embARC CLI, run:
$ pip install -U embarc-cli
$ pip uninstall embarc-cli
embARC CLI uses the user directory Users/xxx/.embarc_cli to save global settings. When you use embARC CLI, it will create two files:
Users/xxx/.embarc_cli/osp.jsonincluding information about root paths of embARC OSP source code.Users/xxx/.embarc_cli/global_config.jsonincluding current global settings:EMBARC_OSP_ROOT,TOOLCHAINand build configurationBOARD,BD_VERandCUR_CORE.
embARC CLI can create applications based on embARC Open Software Platform. A detailed command-specific help is available by using embarc new --help.
When you create a new application, embARC CLI automatically imports the OSP from global settings if you haven't specify a OSP root path by --osp_root, if there is no EMBARC_OSP_ROOT in global settings, you need to input manually.
The arguments for build are:
-dor--pathto specify the path of the application.-bor--boardto select a board.--bd_verto select a board_ver.--coreto select a core.-tor--toolchainto select a toolchain. The value can begnu(GNU) ormw(MetaWare).-jor--parallelto compile code in parallel.--targetto select the build target, the default target isall, you can selsect one from[elf, bin, hex, size, opt, info, all, run, clean].-gor--exportto generate Eclipse IDE project file for your application.--app_configto specify application configuration with a json file.
Let's create an application named helloworld for embARC OSP:
$ embarc new helloworld
[embARC] Current osp root is: C:/Users/jingru/Documents/embarc/embarc_osp
[embARC] Support boards : axs emsk hsdk iotdk nsim
[embARC] Choose board: emsk
[embARC] emsk support versions : 11 22 23
[embARC] Choose board version: 11
[embARC] emsk with versions 11 support cores : arcem4 arcem4cr16 arcem6 arcem6gp
[embARC] choose core: arcem4
[embARC] Support toolchains: gnu mw
[embARC] Choose toolchain: gnu
[embARC] Current configuration
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | EMBARC_OSP_ROOT | OLEVEL |
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
| helloworld | emsk | 11 | arcem4 | gnu | C:\Users\jingru\Documents\embarc\embarc_osp | O3 |
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
[embARC] Start to generate makefile and main.c
[embARC] Finish generate makefile and main.c, and they are in C:\Users\jingru\Documents\embarc\testcli\helloworld
If you want to create an application quickly, you can use --quick, it can create application with current global settings.
$ embarc new --quick
[embARC] Current osp root is: C:/Users/jingru/Documents/embarc/embarc_osp
[embARC] Current configuration
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | EMBARC_OSP_ROOT | OLEVEL |
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
| helloworld | emsk | 23 | arcem7d | gnu | C:\Users\jingru\Documents\embarc\embarc_osp | O3 |
+------------+-------+--------+----------+-----------+---------------------------------------------+--------+
[embARC] Start to generate makefile and main.c
[embARC] Finish generate makefile and main.c, and they are in C:\Users\jingru\Documents\embarc\testcli\helloworld\helloworld
Tip: If you haven't set a global EMBARC_OSP_ROOT, it will raise Can't get osp root from global setting.
When you create application with embarc new, it will generate a file embarc_app.json recording the parameters:
{
"APPL": "helloworld",
"BOARD": "emsk",
"BD_VER": "23",
"CUR_CORE": "arcem7d",
"TOOLCHAIN": "gnu",
"EMBARC_OSP_ROOT": "C:/Users/jingru/Documents/embarc/embarc_osp",
"OLEVEL": "O3"
}
Use the embarc build command to compile your code:
$ embarc build
[embARC] Read embarc_app.json
[embARC] Build target: all
[embARC] Current configuration
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | OLEVEL | EMBARC_OSP_ROOT |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| helloworld | emsk | 23 | arcem7d | gnu | O3 | C:/Users/jingru/Documents/embarc/embarc_osp |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
[embARC] Build command: make BD_VER=23 TOOLCHAIN=gnu OLEVEL=O3 APPL=helloworld BOARD=emsk CUR_CORE=arcem7d all
[embARC] Start to build application
"Creating Directory : " obj_emsk_23/gnu_arcem7d/application/.
"Creating Directory : " obj_emsk_23/gnu_arcem7d/arc
"Creating Directory : " obj_emsk_23/gnu_arcem7d/arc/startup
...
"Copy TCF file C:/Users/jingru/Documents/embarc/embarc_osp/board/emsk/configs/23/tcf/arcem7d.tcf to obj_emsk_23/gnu_arcem7d/embARC_generated/arc.tcf"
"Generate Metaware compiler argument file obj_emsk_23/gnu_arcem7d/embARC_generated/ccac.arg"
"Generate ARC GNU compiler argument file obj_emsk_23/gnu_arcem7d/embARC_generated/gcc.arg"
"Generate nSIM properties file obj_emsk_23/gnu_arcem7d/embARC_generated/nsim.props"
"Generate Metaware Debugger argument file obj_emsk_23/gnu_arcem7d/embARC_generated/mdb.arg"
"Generate ARC core config header file obj_emsk_23/gnu_arcem7d/embARC_generated/core_config.h"
"Generate ARC core config assembler file obj_emsk_23/gnu_arcem7d/embARC_generated/core_config.s"
"Generating Linkfile : " obj_emsk_23/gnu_arcem7d/linker_gnu.ldf
"Compiling : " main.c
...
"Archiving : " obj_emsk_23/gnu_arcem7d/liblibclib.a
"Archiving : " obj_emsk_23/gnu_arcem7d/libembarc.a
"Linking : " obj_emsk_23/gnu_arcem7d/helloworld_gnu_arcem7d.elf
[embARC] Completed in: (79.9449999332)s
To run examples in embARC OSP Source code, run embarc_osp\example\baremetal\ble_rn4020 for instance:
$ embarc build run
[embARC] Build target: run
[embARC] Read makefile and get configuration
[embARC] Run command make info
[embARC] Current configuration
+--------+-------+--------+----------+-----------+--------+---------------------------------------------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | OLEVEL | EMBARC_OSP_ROOT |
+--------+-------+--------+----------+-----------+--------+---------------------------------------------+
| rn4020 | iotdk | 10 | arcem9d | mw | O2 | C:/Users/jingru/Documents/embarc/embarc_osp |
+--------+-------+--------+----------+-----------+--------+---------------------------------------------+
[embARC] Build command: make BD_VER=10 TOOLCHAIN=mw OLEVEL=O2 APPL=rn4020 BOARD=iotdk CUR_CORE=arcem9d run
[embARC] Start to build application
"Creating Directory : " obj_iotdk_10/mw_arcem9d/application/.
"Creating Directory : " obj_iotdk_10/mw_arcem9d/arc
...
"Compiling : " ../../../library/clib/embARC_target.c
"Archiving : " obj_iotdk_10/mw_arcem9d/liblibclib.a
"Archiving : " obj_iotdk_10/mw_arcem9d/libembarc.a
"Linking : " obj_iotdk_10/mw_arcem9d/rn4020_mw_arcem9d.elf
"Download & Run obj_iotdk_10/mw_arcem9d/rn4020_mw_arcem9d.elf"
mdb -nooptions -nogoifmain -toggle=include_local_symbols=1 -hard -digilent -run obj_iotdk_10/mw_arcem9d/rn4020_mw_arcem9d.elf
[DIGILENT] This device supports JTAG7 scan formats.
[DIGILENT] Device enumeration: #0 is `IoTDK'=DesignWare ARC SDP.
[DIGILENT] We choose device : #0 `IoTDK' from 1 possible devices.
[DIGILENT] Product=507 variant=1 fwid=56 firmware-version=10f.
[DIGILENT] It is possible to set the JTAG speed.
[DIGILENT] Current speed is 10000000 Hz.
[DIGILENT] Suppress these messages with environment variable DIG_VERBOSE=0.
SmaRT Build Configuration Register: 0x10003 (stack size=64)
The Tera Term output:
-----------------------------------------------------------
____ _ ____
| _ \ _____ _____ _ __ ___ __| | __ ) _ _
| |_) / _ \ \ /\ / / _ \ '__/ _ \/ _` | _ \| | | |
| __/ (_) \ V V / __/ | | __/ (_| | |_) | |_| |
|_| \___/ \_/\_/ \___|_| \___|\__,_|____/ \__, |
|___/
_ _ ____ ____
___ _ __ ___ | |__ / \ | _ \ / ___|
/ _ \ '_ ` _ \| '_ \ / _ \ | |_) | |
| __/ | | | | | |_) / ___ \| _ <| |___
\___|_| |_| |_|_.__/_/ \_\_| \_\\____|
------------------------------------------------------------
embARC Build Time: Jan 18 2019, 16:18:26
Compiler Version: Metaware, 4.2.1 Compatible Clang 6.0.1 (branches/release_60)
n4020 test application
state: INITIALIZING
rx:CMD
state: READY
state: WAITING_FOR_AOK
tx: SF,1
rx:AOK
state: READY
state: WAITING_FOR_AOK
tx: SN,embARC
rx:AOK
state: READY
state: WAITING_FOR_AOK
...
service uuid, skip it
rx: 000102030405060708090A0B0C0D0E0F,001B,02,05
rx: 000102030405060708090A0B0C0D0E0F,001C,10,02
rx: 101112131415161718191A1B1C1D1E1F,001E,0A,05
rx:END
state: READY
state: WAITING_FOR_AOK
rx:AOK
state: READY
You can specify parameters in two ways:
- Use
--xxx:
$ embarc build --board iotdk --bd_ver 10 --core arcem9d --target all
[embARC] Read embarc_app.json
[embARC] Build target: all
[embARC] Current configuration
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | OLEVEL | EMBARC_OSP_ROOT |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| helloworld | iotdk | 10 | arcem9d | gnu | O3 | C:/Users/jingru/Documents/embarc/embarc_osp |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
[embARC] Build command: make BD_VER=10 TOOLCHAIN=gnu OLEVEL=O3 APPL=helloworld BOARD=iotdk CUR_CORE=arcem9d all
[embARC] Start to build application
"Creating Directory : " obj_iotdk_10/gnu_arcem9d/application/.
...
"Copy TCF file C:/Users/jingru/Documents/embarc/embarc_osp/board/iotdk/configs/10/tcf/arcem9d.tcf to obj_iotdk_10/gnu_arcem9d/embARC_generated/arc.tcf"
"Generate Metaware compiler argument file obj_iotdk_10/gnu_arcem9d/embARC_generated/ccac.arg"
"Generate ARC GNU compiler argument file obj_iotdk_10/gnu_arcem9d/embARC_generated/gcc.arg"
"Generate nSIM properties file obj_iotdk_10/gnu_arcem9d/embARC_generated/nsim.props"
"Generate Metaware Debugger argument file obj_iotdk_10/gnu_arcem9d/embARC_generated/mdb.arg"
"Generate ARC core config header file obj_iotdk_10/gnu_arcem9d/embARC_generated/core_config.h"
"Generate ARC core config assembler file obj_iotdk_10/gnu_arcem9d/embARC_generated/core_config.s"
"Generating Linkfile : " obj_iotdk_10/gnu_arcem9d/linker_gnu.ldf
"Compiling : " main.c
"Compiling : " C:/Users/jingru/Documents/embarc/embarc_osp/board/board.c
"Compiling : " C:/Users/jingru/Documents/embarc/embarc_osp/arc/startup/arc_cxx_support.c
...
"Archiving : " obj_iotdk_10/gnu_arcem9d/liblibclib.a
"Archiving : " obj_iotdk_10/gnu_arcem9d/libembarc.a
"Linking : " obj_iotdk_10/gnu_arcem9d/helloworld_gnu_arcem9d.elf
[embARC] Completed in: (97.7479999065)s
- Use
BOARD=iotdk BD_VER=10 CUR_CORE=arcem9d clean, this is the default format when you build withmakecommand:
$ embarc build BOARD=iotdk BD_VER=10 CUR_CORE=arcem9d clean
[embARC] Read embarc_app.json
[embARC] Build target: clean
[embARC] Current configuration
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | OLEVEL | EMBARC_OSP_ROOT |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| helloworld | iotdk | 10 | arcem9d | gnu | O3 | C:/Users/jingru/Documents/embarc/embarc_osp |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
[embARC] Build command: make BD_VER=10 TOOLCHAIN=gnu OLEVEL=O3 APPL=helloworld BOARD=iotdk CUR_CORE=arcem9d clean
[embARC] Start to build application
"Clean Workspace For Selected Configuration : iotdk_10-gnu_arcem9d"
C:\WINDOWS\system32\cmd.exe /C if exist obj_iotdk_10\gnu_arcem9d C:\WINDOWS\system32\cmd.exe /C rd /S /Q obj_iotdk_10\gnu_arcem9d
C:\WINDOWS\system32\cmd.exe /C if exist .sc.project C:\WINDOWS\system32\cmd.exe /C rd /S /Q .sc.project
[embARC] Completed in: (1.96500015259)s
Tip: embARC defines different build targets for selected configuration. A detailed command-specific help is available by using make --help. You can specify a target :
embarc build --target xxx.embarc build [other paramters] xxx, embARC CLI will choose the last parameter as target.
If you need to debug your code, you can export your source tree to IDE project file to use the IDE's debugging facilities. embARC CLI supports exporting to Eclipse using GNU or MetaWare.
For example:
$ embarc build --export
[embARC] Read embarc_app.json
[embARC] Current configuration
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| APPL | BOARD | BD_VER | CUR_CORE | TOOLCHAIN | OLEVEL | EMBARC_OSP_ROOT |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
| helloworld | iotdk | 10 | arcem9d | gnu | O3 | C:/Users/jingru/Documents/embarc/embarc_osp |
+------------+-------+--------+----------+-----------+--------+---------------------------------------------+
[embARC] Start to generate IDE project
[embARC] Run command [make opt]
[embARC] Get inculdes and defines
[embARC] Start to generate IDE project accroding to templates (.project.tmpl and .cproject.tmpl)
[embARC] Finish generate IDE project and the files are in C:\Users\jingru\Documents\embarc\testcli\helloworld
[embARC] Open ARC GNU IDE (version) Eclipse - >File >Open Projects from File System >Paste
C:\Users\jingru\Documents\embarc\testcli\helloworld
-
Open ARC GNU IDE 2018.09 Eclipse, click File -> Open Projects from File System .
-
Paste
C:\Users\jingru\Documents\embarc\testcli\helloworldto Import source, and click Finish.You can your project in Project Explorer view.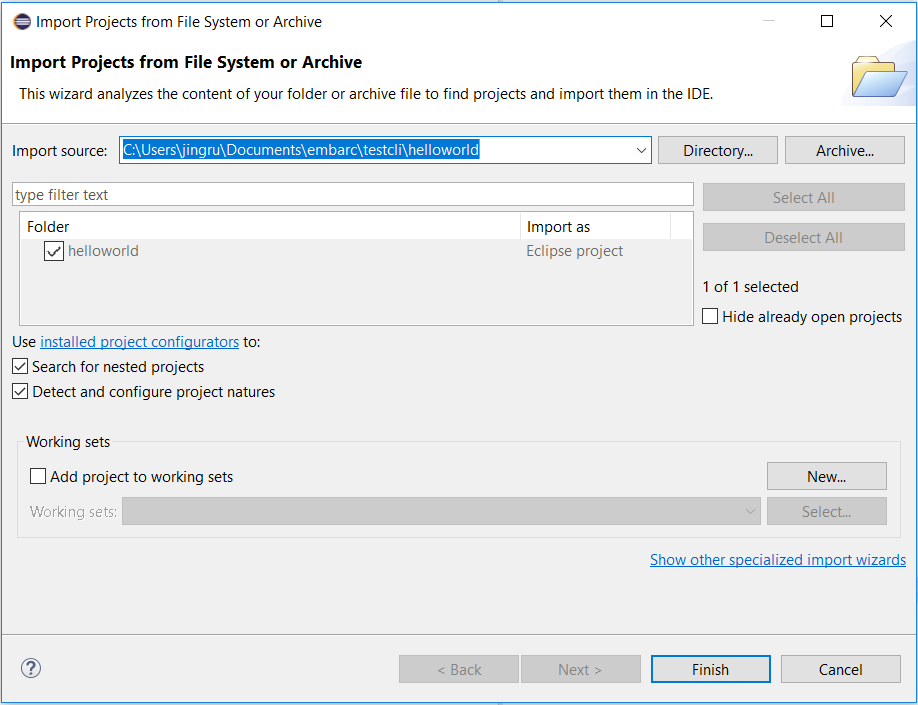
-
From the Project Explorer view, right-click the project name
helloworld, select Properitise and click C/C++ Build, you can see the build settings.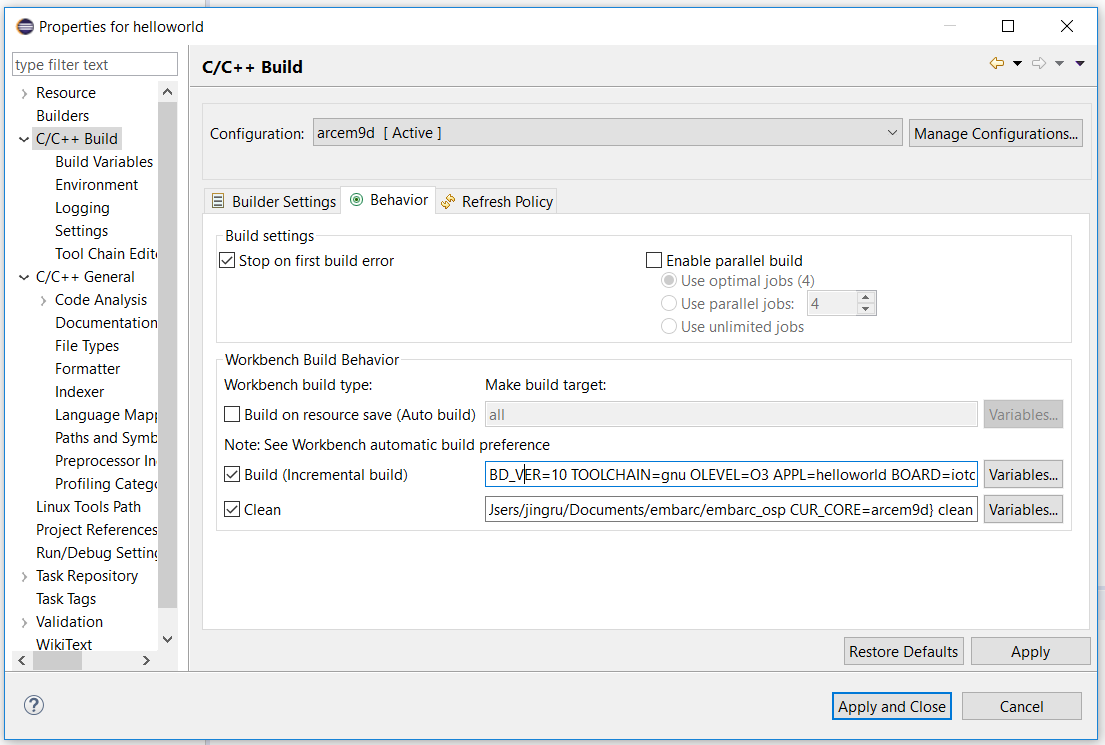
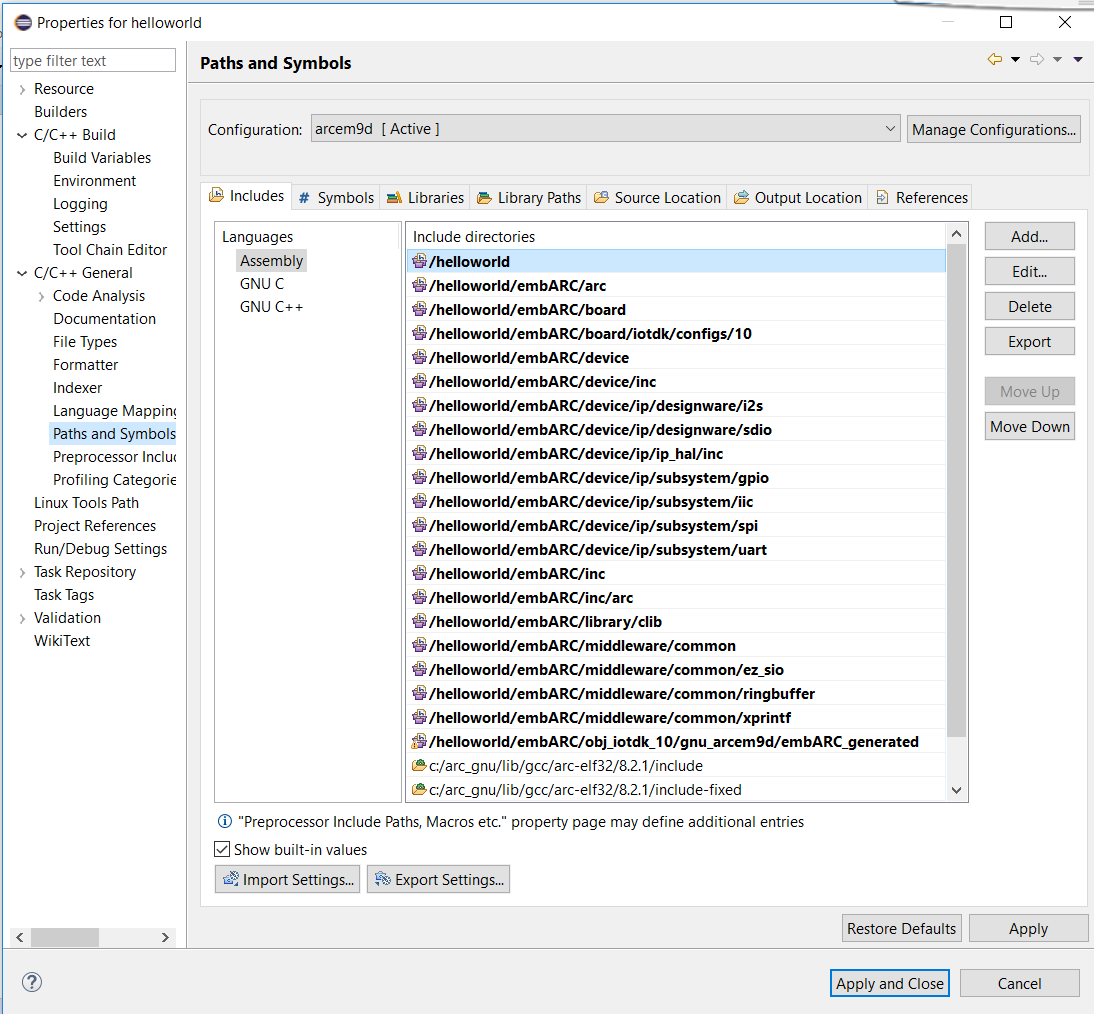
Click C/C++ General -> Paths and Symbols.
-
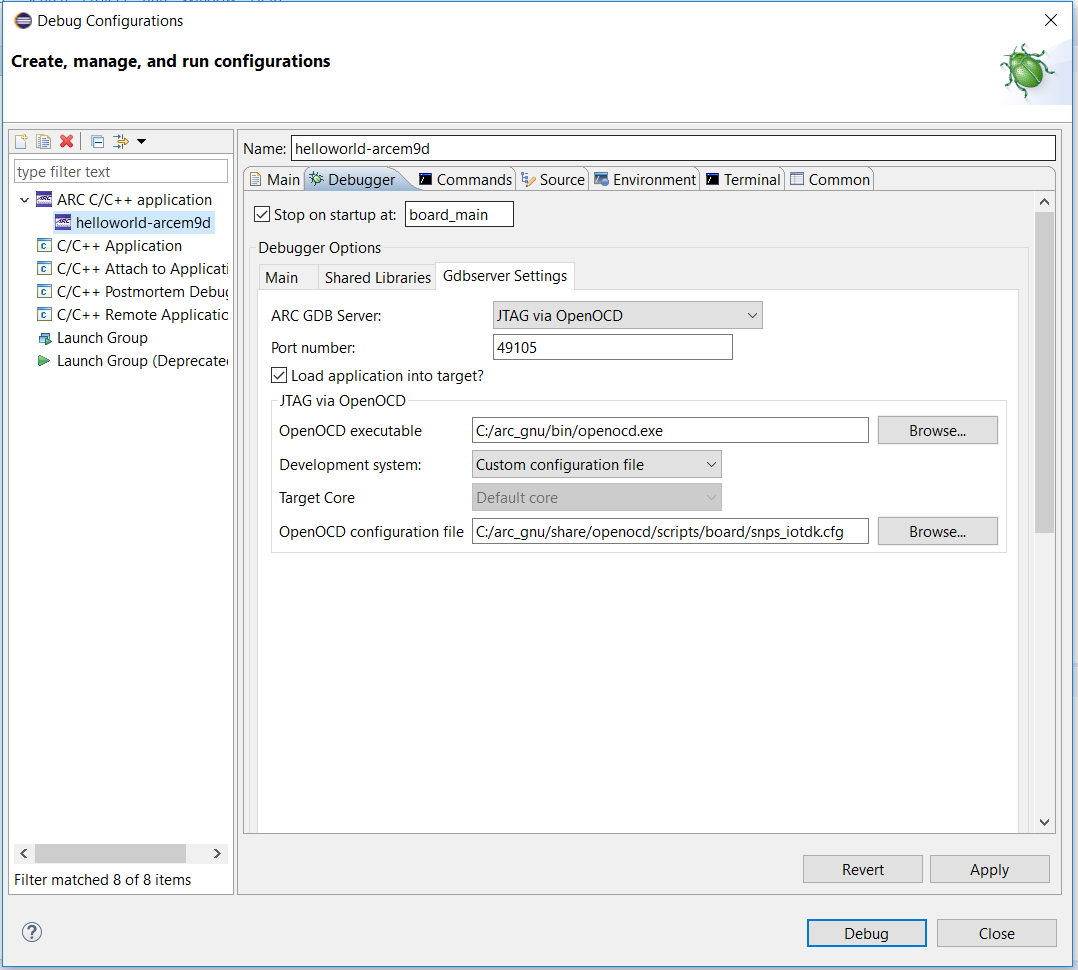
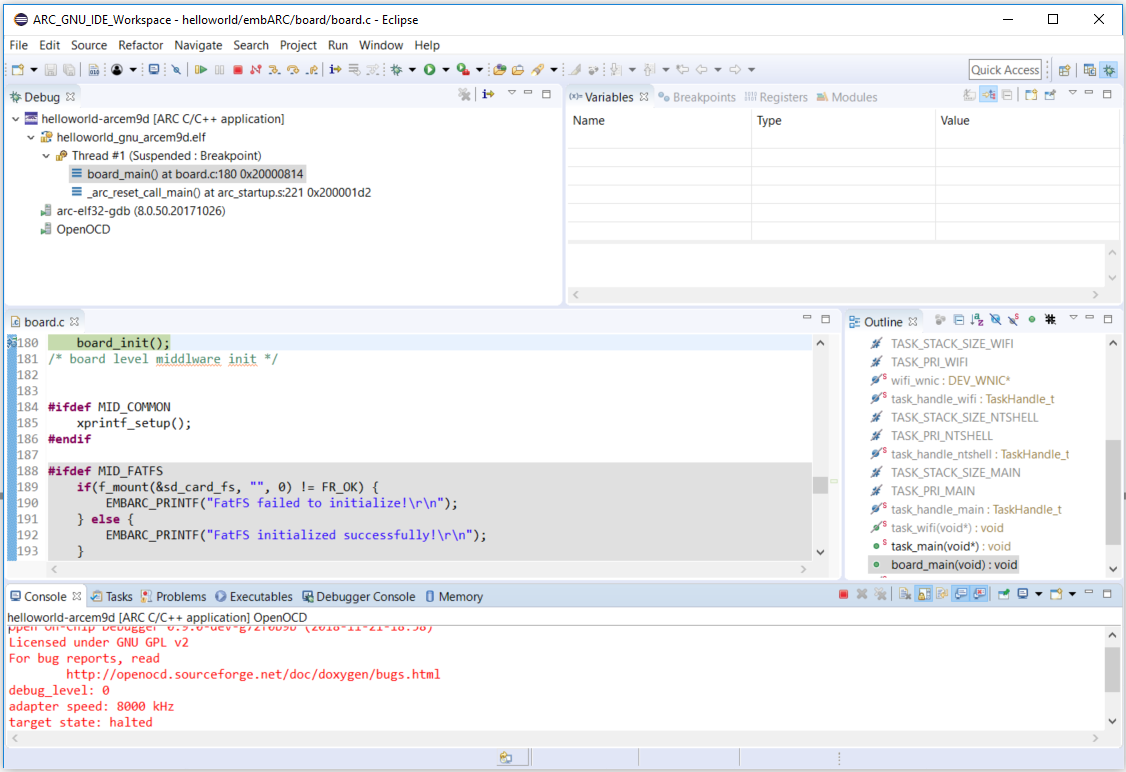
Click the Run > Debug Configurations... menu option. The Debug Configurations dialog opens.
-
Click helloworld-arcem9d, you can see that data is automatically entered, take a moment to verify its accuracy or change as needed.
-
Click Debug. You may be prompted to switch to the Debug perspective. Click Yes.





The embARC CLI provides a flexible mechanism for configuring the embARC program. You can use it to set, get, update or unset embARC build configuration options. These options can be global or local (per program).
Currently supported options: osp, toolchain, build_cfg. A detailed command-specific help is available by using embarc config --help.
You can use embarc config osp to config the EMBARC_OSP_ROOT.
The commands for embarc config osp are:
embarc config osp --add <name> <url/path> [<dest>]to addEMBARC_OSP_ROOTto a global fileosp.json. This file is save in current user folder. Parameter<url/path>can be: HTTPS URL, local path or zip file path.embarc config osp --rename <oldname> <newname>to rename aEMBARC_OSP_ROOT.embarc config osp --remove <name>to remove the path fromosp.json.embarc config osp --listto show all recorded paths.embarc config osp --set <name>to set a path as globalEMBARC_OSP_ROOT.
Add a EMBARC_OSP_ROOT for instance:
$ embarc config osp --add new_osp https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
[embARC] Start clone embarc_osp
[embARC] Finish clone embarc_osp
[embARC] Add (C:\Users\jingru\Documents\embarc\testcli\embarc_osp) to user profile osp.json
This command will clone the embARC Source code from github, if the folder new_osp does't exist in current path. You can specify another path to clone the source code by:
$ embarc config osp --add new_osp https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git another_path
All paths is to look for Users/xxx/.embarc_cli/osp.json.
osp.json
{
"embarc_osp": {
"directory": "C:/Users/jingru/Documents/embarc/embarc_osp",
"source": "https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git",
"type": "git"
},
"embarc": {
"directory": "C:/Users/jingru/Documents/embarc/testcli/helloworld/embarcnew",
"source": "https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git",
"type": "git"
},
"new_osp": {
"directory": "C:/Users/jingru/Documents/embarc/testcli/new_osp",
"source": "https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git",
"type": "git"
}
}
To see all recorded EMBARC_OSP_ROOT, run:
$ embarc config osp --list
embarc_osp
directory: C:/Users/jingru/Documents/embarc/embarc_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
embarc
directory: C:/Users/jingru/Documents/embarc/testcli/helloworld/embarcnew
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
new_osp
directory: C:/Users/jingru/Documents/embarc/testcli/new_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
To rename a EMBARC_OSP_ROOT, run:
$ embarc config osp --rename embarc rename
[embARC] Start rename embarc to rename
rename
directory: C:/Users/jingru/Documents/embarc/testcli/helloworld/embarcnew
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
embarc_osp
directory: C:/Users/jingru/Documents/embarc/embarc_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
new_osp
directory: C:/Users/jingru/Documents/embarc/testcli/new_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
To remove a EMBARC_OSP_ROOT, run:
$ embarc config osp --remove rename
[embARC] Start remove rename
embarc_osp
directory: C:/Users/jingru/Documents/embarc/embarc_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
new_osp
directory: C:/Users/jingru/Documents/embarc/testcli/new_osp
source: https://github.com/foss-for-synopsys-dwc-arc-processors/embarc_osp.git
type: git
You can use embarc config toolchain to config TOOLCHAIN. Currently supported toolchains are GNU and MetaWare.
You can check the current toolchain in your platform.
$ embarc config toolchain gnu
[embARC] Current GNU verion: 2019.03
If you haven't installed the GNU yet, it will remind you to download it, using --version to specify the version number. embARC CLI doesn't support for downloading MetaWare.
To set global build configuration, use embarc config build_cfg:
$ embarc config build_cfg BOARD emsk
[embARC] Set BOARD = emsk as global setting
$ embarc config build_cfg BD_VER 23
[embARC] Set BD_VER = 23 as global setting
$ embarc config build_cfg CUR_CORE arcem7d
[embARC] Set CUR_CORE = arcem7d as global setting
You can use embarc appconfig to set the program build configuration.
The arguments for build are:
-aor--applicationto specify the path of the application.-bor--boardto select a board.--bd_verto select a board_ver.--cur_coreto select a core.-tor--toolchainto select toolchain. The value can begnu(GNU) ormw(MetaWare).-jor--parallelto compile code in parallel.--targetto select the build target, the default target isall, you can selsect one from[elf, bin, hex, size, all].--osp_rootto select a path asEMBARC_OSP_ROOT.--olevelto specify theOLEVEL.
To see current application configuration, run:
$ embarc appconfig
[embARC] Read makefile and get configuration
[embARC] Read embarc_config.json
[embARC] Current configuraion
+-----------------+---------------------------------------------+
| option | value |
+-----------------+---------------------------------------------+
| APPL | helloworld |
| BOARD | iotdk |
| BD_VER | 10 |
| CUR_CORE | arcem9d |
| TOOLCHAIN | gnu |
| EMBARC_OSP_ROOT | C:/Users/jingru/Documents/embarc/embarc_osp |
| OLEVEL | O3 |
+-----------------+---------------------------------------------+
To change current application configuration. For example, update configuration to BOARD=emsk BD_VER=11 CUR_CORE=arcem4, run:
$ embarc appconfig --board emsk --bd_ver 11 --cur_core arcem4
[embARC] Read makefile and get configuration
[embARC] Read embarc_config.json
[embARC] Current configuraion
+-----------------+---------------------------------------------+
| option | value |
+-----------------+---------------------------------------------+
| APPL | helloworld |
| BOARD | emsk |
| BD_VER | 11 |
| CUR_CORE | arcem4 |
| TOOLCHAIN | gnu |
| EMBARC_OSP_ROOT | C:/Users/jingru/Documents/embarc/embarc_osp |
| OLEVEL | O3 |
+-----------------+---------------------------------------------+