- The current version supports Linux and windows, but the source code structure has changed.
- During use, people should stay away from the robot arm to avoid accidental injury or damage to other items by the robot arm.
- Protect the arm before use.
- Before you exercise, please make sure you don't encounter obstacles.
- Protect the arm before unlocking the motor.
-
- Support windows platform
- Support servo cartesian interface
-
- Added several attributes
- Support tool coordinate system movement
- Support joint range limitation, collision rebound setting
- Support user coordinate system setting
- Support the status of the air pump
- Added counter interface
-
Get the code:
git clone https://github.com/xArm-Developer/xArm-CPLUS-SDK.git -
Change directory
cd ./xArm-CPLUS-SDK/ -
Build library:
make xarm
-
Build all example
make test -
Build a example
make test-0002-get_property # build example/test-0002-get_property.cc -
Build all (build library and build all example)
make # make xarm && make test -
Install
sudo make install
-
Uninstall
sudo make uninstall
-
Run a example
./build/example/0002-get_property 192.168.1.221
-
Running environment
It is recommended to run the project with visual studio 2015.Make sure your visual studio 2015 has a visual C++ development environment installed before running. -
Get the code:
git clone https://github.com/xArm-Developer/xArm-CPLUS-SDK.git -
Change directory
Change your directory xArm-CPLUS-SDK/visual_studio -
Open project
If you changed your directory, you can see a visual_studio.sln file. Click this file you will open the project. -
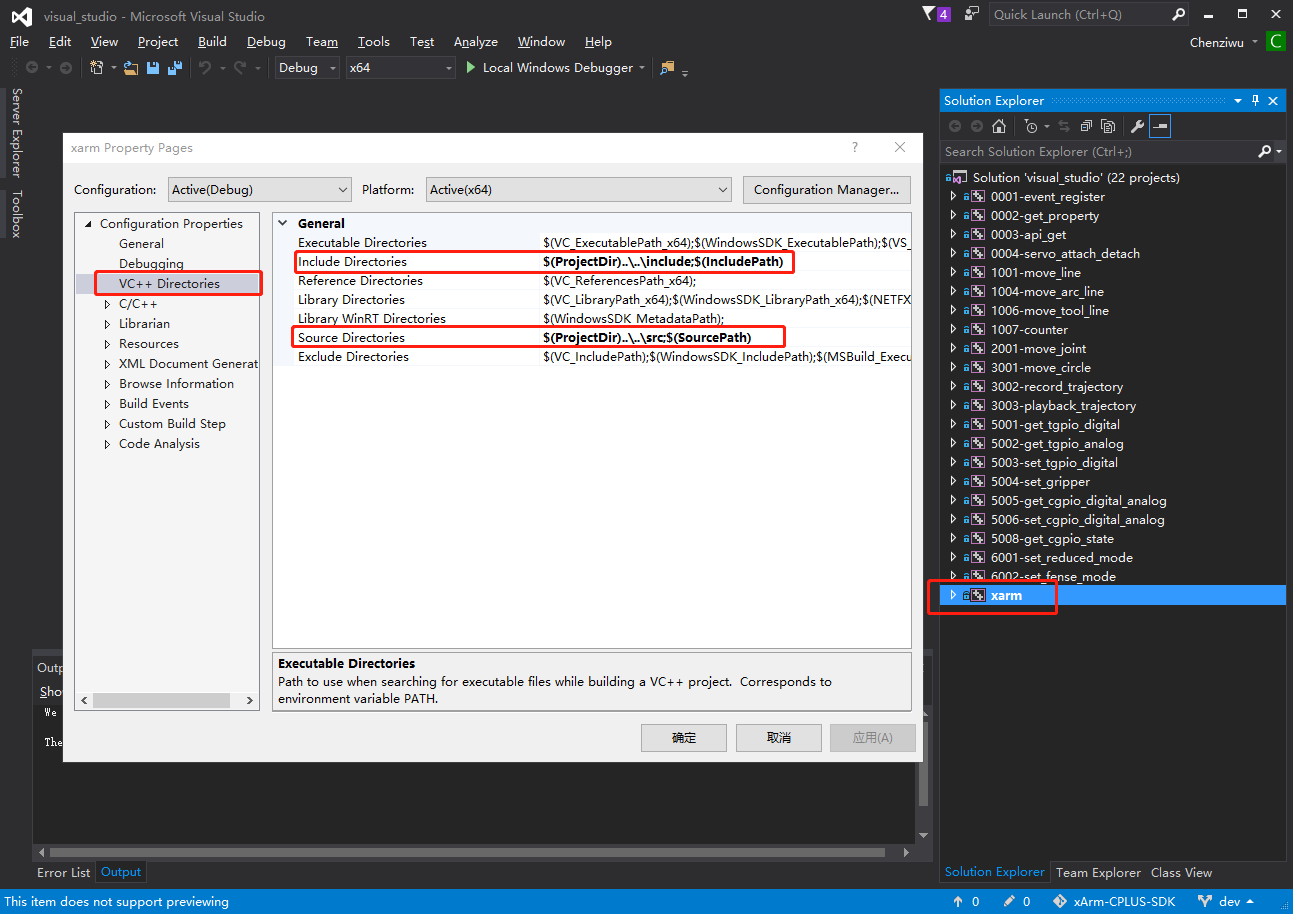
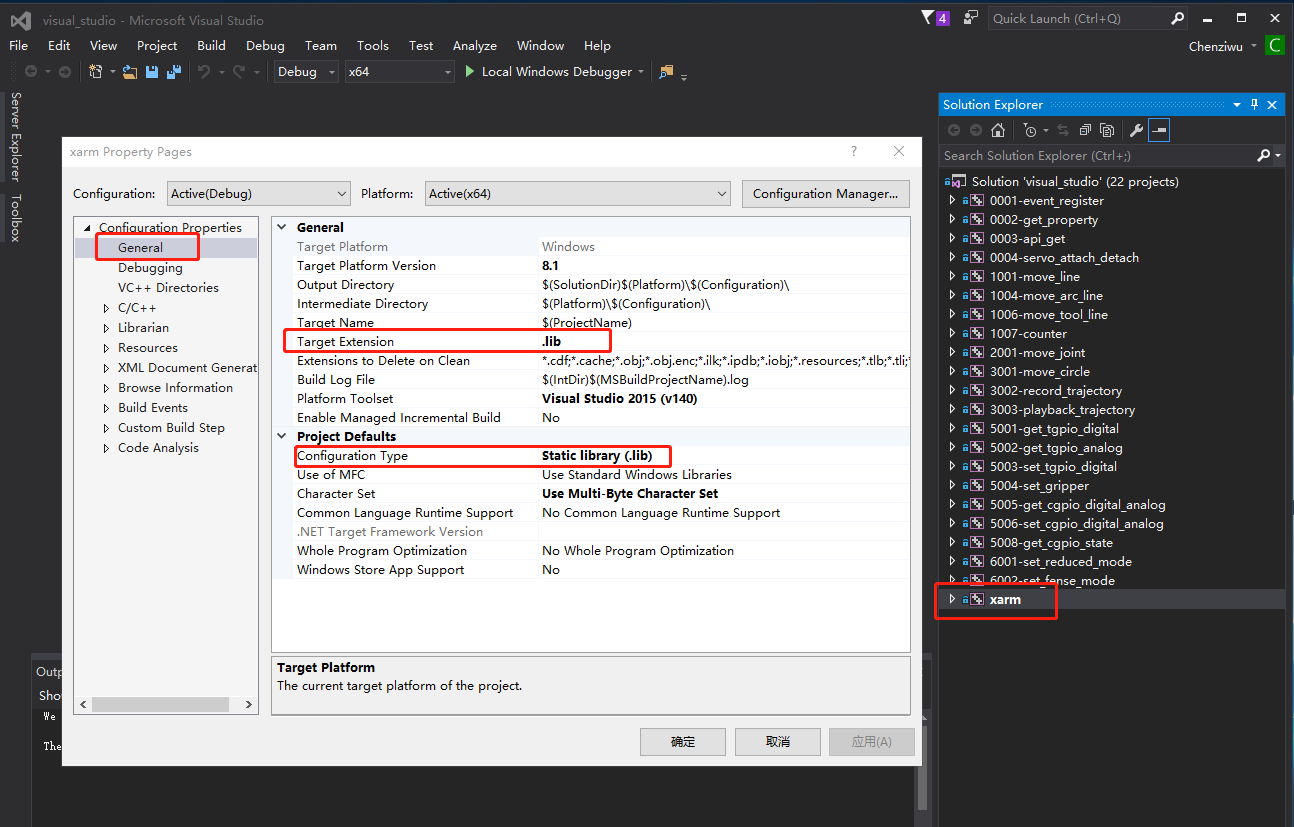
Check the xarm project properties
Open the xarm property pages and make sure your project configuration is the same as the following screenshot configuration. VC++ Directories path $(ProjectDir)..\..\include $(ProjectDir)..\..\src
-
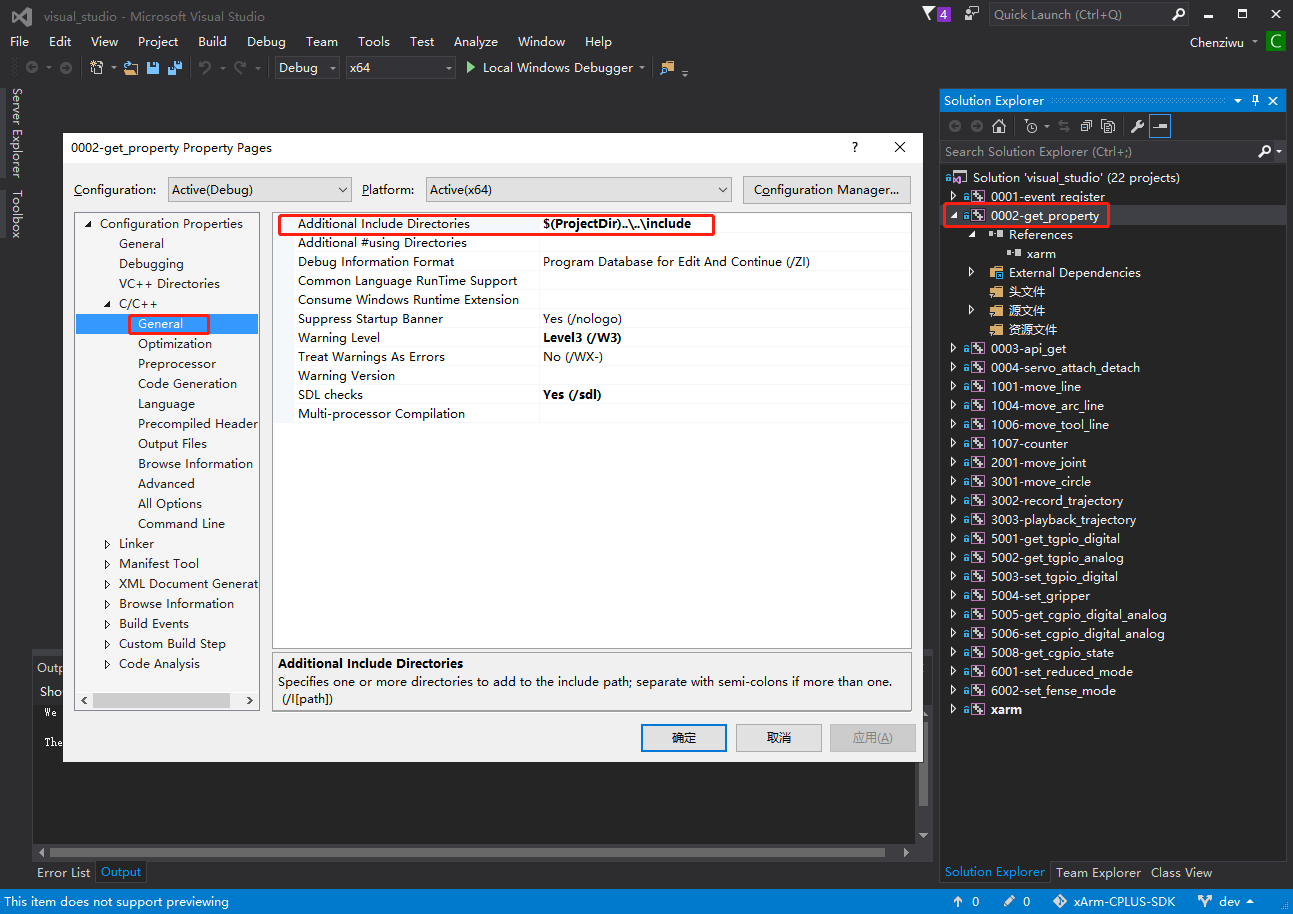
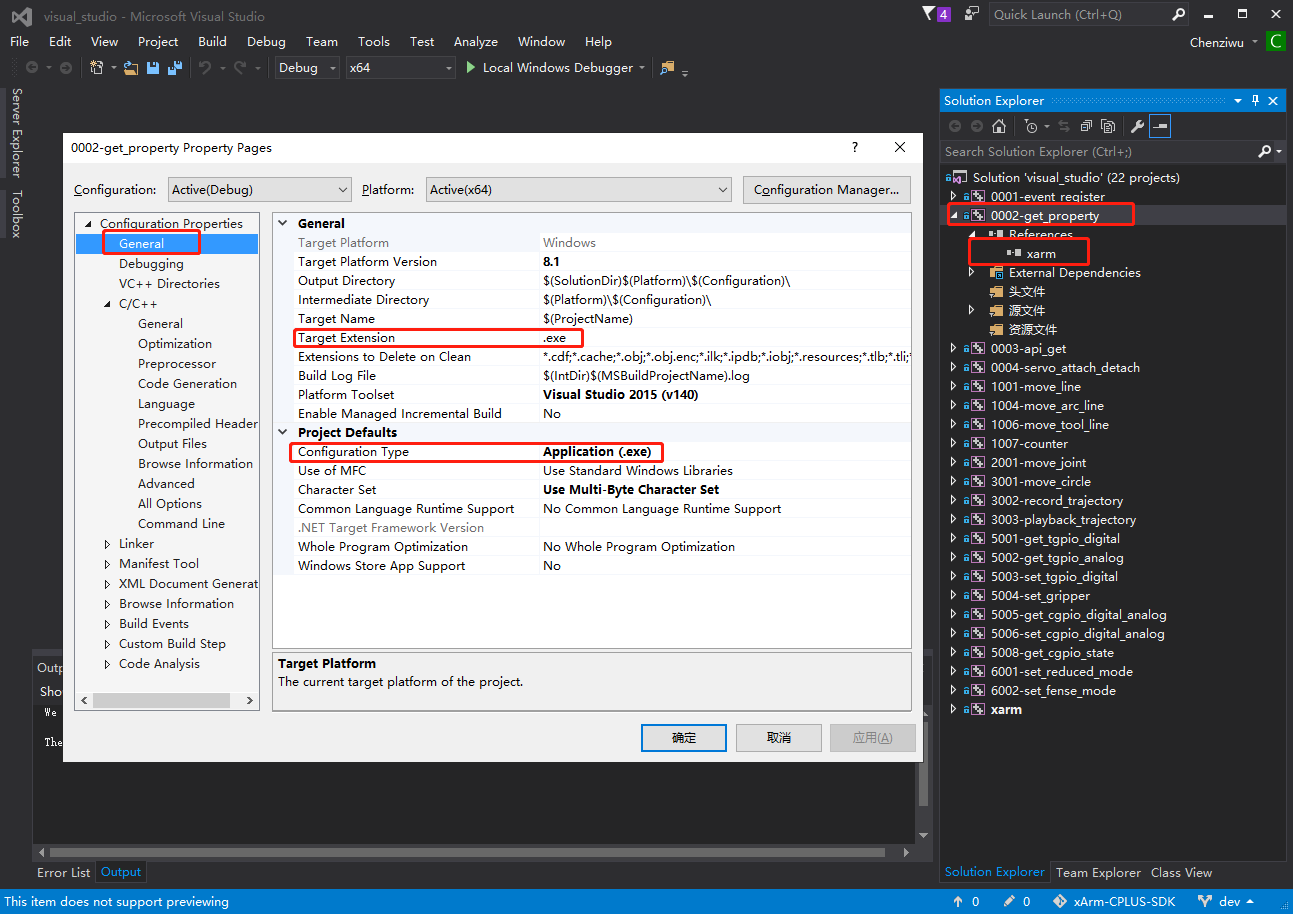
Check the example project properties
Open the example property pages and make sure your project configuration is the same as the following screenshot configuration. Example project dependencies and xarm projects so references must be added to run.
-
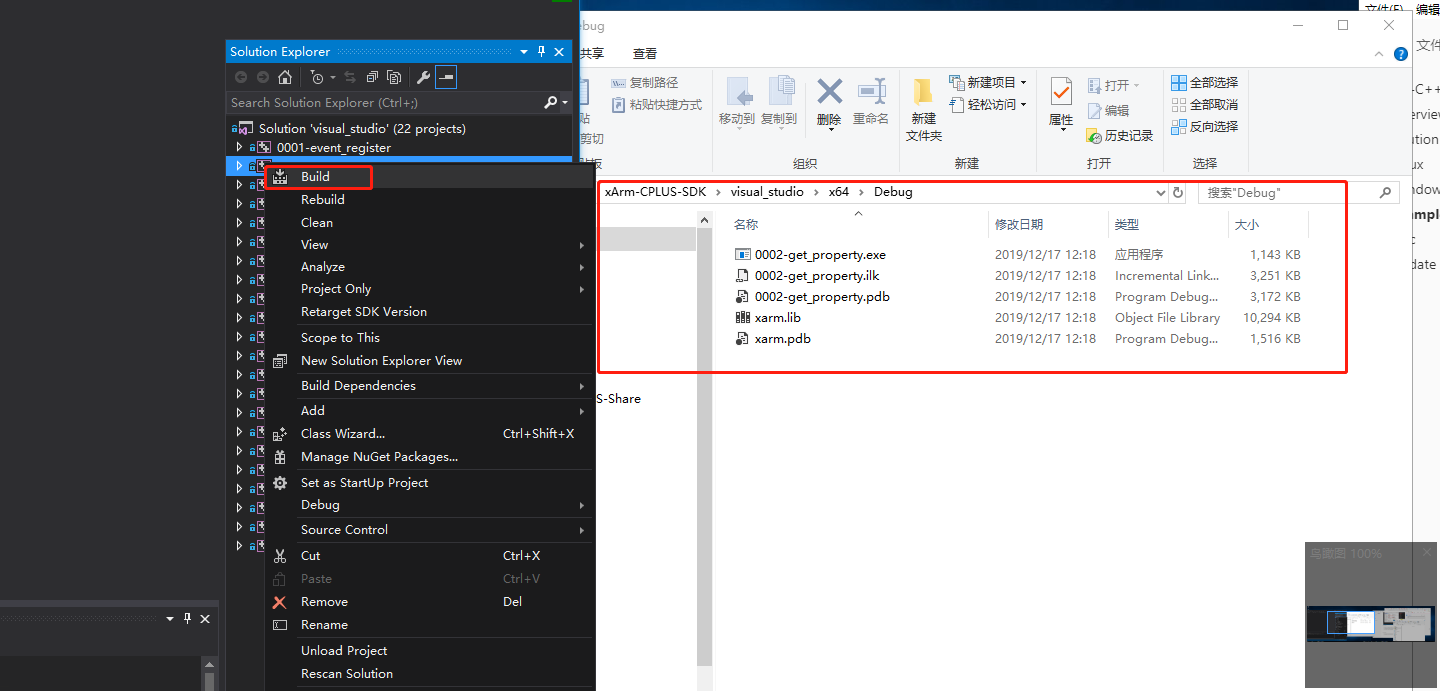
Build project
Right click example project and build the projiect.If the example project bulid successful you will get a .exe file in you project path. .exe path like this C:\Users\ufactory\Desktop\xArm-CPLUS-SDK\visual_studio\x64\Debug\0002-get_property.exe
-
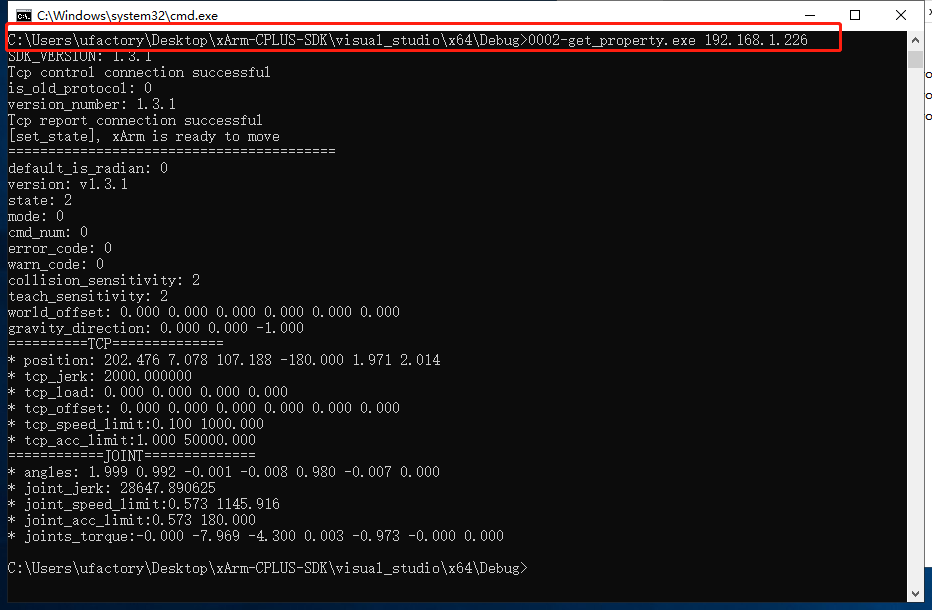
Run project
You can use cmd run project.
-
New project
If you want to create a new project, you need to pay attention to the dependent path of your new project. You must make sure that the configuration of the project you create is the same as that of the example project.





