Keras Temporal Convolutional Network. [paper]
Tested with Tensorflow 2.3, 2.4, 2.5, 2.6, 2.7 and 2.8rc0 (Dec 22, 2021).
![]()
pip install keras-tcn
pip install keras-tcn --no-dependencies # without the dependencies if you already have TF/Numpy.For MacOS M1 users: pip install --no-binary keras-tcn keras-tcn. The --no-binary option will force pip to download the sources (tar.gz) and re-compile it locally. Also make sure grpcio and h5py are installed correctly. There are some tutorials on how to do that online.
- TCNs exhibit longer memory than recurrent architectures with the same capacity.
- Performs better than LSTM/GRU on a vast range of tasks (Seq. MNIST, Adding Problem, Copy Memory, Word-level PTB...).
- Parallelism (convolutional layers), flexible receptive field size (possible to specify how far the model can see), stable gradients (backpropagation through time, vanishing gradients)...
 Visualization of a stack of dilated causal convolutional layers (Wavenet, 2016)
Visualization of a stack of dilated causal convolutional layers (Wavenet, 2016)
- Keras TCN
The usual way is to import the TCN layer and use it inside a Keras model. An example is provided below for a regression task (cf. tasks for other examples):
from tcn import TCN, tcn_full_summary
from tensorflow.keras.layers import Dense
from tensorflow.keras.models import Sequential
# if time_steps > tcn_layer.receptive_field, then we should not
# be able to solve this task.
batch_size, time_steps, input_dim = None, 20, 1
def get_x_y(size=1000):
import numpy as np
pos_indices = np.random.choice(size, size=int(size // 2), replace=False)
x_train = np.zeros(shape=(size, time_steps, 1))
y_train = np.zeros(shape=(size, 1))
x_train[pos_indices, 0] = 1.0 # we introduce the target in the first timestep of the sequence.
y_train[pos_indices, 0] = 1.0 # the task is to see if the TCN can go back in time to find it.
return x_train, y_train
tcn_layer = TCN(input_shape=(time_steps, input_dim))
# The receptive field tells you how far the model can see in terms of timesteps.
print('Receptive field size =', tcn_layer.receptive_field)
m = Sequential([
tcn_layer,
Dense(1)
])
m.compile(optimizer='adam', loss='mse')
tcn_full_summary(m, expand_residual_blocks=False)
x, y = get_x_y()
m.fit(x, y, epochs=10, validation_split=0.2)A ready-to-use TCN model can be used that way (cf. tasks for some examples):
from tcn import compiled_tcn
model = compiled_tcn(...)
model.fit(x, y) # Keras model.TCN(
nb_filters=64,
kernel_size=3,
nb_stacks=1,
dilations=(1, 2, 4, 8, 16, 32),
padding='causal',
use_skip_connections=True,
dropout_rate=0.0,
return_sequences=False,
activation='relu',
kernel_initializer='he_normal',
use_batch_norm=False,
use_layer_norm=False,
use_weight_norm=False,
**kwargs
)nb_filters: Integer. The number of filters to use in the convolutional layers. Would be similar tounitsfor LSTM. Can be a list.kernel_size: Integer. The size of the kernel to use in each convolutional layer.dilations: List/Tuple. A dilation list. Example is: [1, 2, 4, 8, 16, 32, 64].nb_stacks: Integer. The number of stacks of residual blocks to use.padding: String. The padding to use in the convolutions. 'causal' for a causal network (as in the original implementation) and 'same' for a non-causal network.use_skip_connections: Boolean. If we want to add skip connections from input to each residual block.return_sequences: Boolean. Whether to return the last output in the output sequence, or the full sequence.dropout_rate: Float between 0 and 1. Fraction of the input units to drop.activation: The activation used in the residual blocks o = activation(x + F(x)).kernel_initializer: Initializer for the kernel weights matrix (Conv1D).use_batch_norm: Whether to use batch normalization in the residual layers or not.use_layer_norm: Whether to use layer normalization in the residual layers or not.use_weight_norm: Whether to use weight normalization in the residual layers or not.kwargs: Any other set of arguments for configuring the parent class Layer. For example "name=str", Name of the model. Use unique names when using multiple TCN.
3D tensor with shape (batch_size, timesteps, input_dim).
timesteps can be None. This can be useful if each sequence is of a different length: Multiple Length Sequence Example.
- if
return_sequences=True: 3D tensor with shape(batch_size, timesteps, nb_filters). - if
return_sequences=False: 2D tensor with shape(batch_size, nb_filters).
Here are some of my notes regarding my experience using TCN:
-
nb_filters: Present in any ConvNet architecture. It is linked to the predictive power of the model and affects the size of your network. The more, the better unless you start to overfit. It's similar to the number of units in an LSTM/GRU architecture too. -
kernel_size: Controls the spatial area/volume considered in the convolutional ops. Good values are usually between 2 and 8. If you think your sequence heavily depends on t-1 and t-2, but less on the rest, then choose a kernel size of 2/3. For NLP tasks, we prefer bigger kernel sizes. A large kernel size will make your network much bigger. -
dilations: It controls how deep your TCN layer is. Usually, consider a list with multiple of two. You can guess how many dilations you need by matching the receptive field (of the TCN) with the length of features in your sequence. For example, if your input sequence is periodic, you might want to have multiples of that period as dilations. -
nb_stacks: Not very useful unless your sequences are very long (like waveforms with hundreds of thousands of time steps). -
padding: I have only usedcausalsince a TCN stands for Temporal Convolutional Networks. Causal prevents information leakage. -
use_skip_connections: Skip connections connects layers, similarly to DenseNet. It helps the gradients flow. Unless you experience a drop in performance, you should always activate it. -
return_sequences: Same as the one present in the LSTM layer. Refer to the Keras doc for this parameter. -
dropout_rate: Similar torecurrent_dropoutfor the LSTM layer. I usually don't use it much. Or set it to a low value like0.05. -
activation: Leave it to default. I have never changed it. -
kernel_initializer: If the training of the TCN gets stuck, it might be worth changing this parameter. For example:glorot_uniform. -
use_batch_norm,use_weight_norm,use_weight_norm: Use normalization if your network is big enough and the task contains enough data. I usually prefer usinguse_layer_norm, but you can try them all and see which one works the best.
The receptive field is defined as: the maximum number of steps back in time from current sample at time T, that a filter from (block, layer, stack, TCN) can hit (effective history) + 1. The receptive field of the TCN can be calculated using the formula:

where Nstack is the number of stacks, Nb is the number of residual blocks per stack, d is a vector containing the dilations of each residual block in each stack, and K is the kernel size. The 2 is there because there are two Conv1d layers in a single ResidualBlock.
Ideally you want your receptive field to be bigger than the largest length of input sequence, if you pass a sequence longer than your receptive field into the model, any extra values (further back in the sequence) will be replaced with zeros.
NOTE: Unlike the TCN, example figures only include a single Conv1d per layer, so the formula becomes Rfield = 1 + (K-1)⋅Nstack⋅Σi di (without the factor 2).
- If a dilated conv net has only one stack of residual blocks with a kernel size of
2and dilations[1, 2, 4, 8], its receptive field is16. The image below illustrates it:
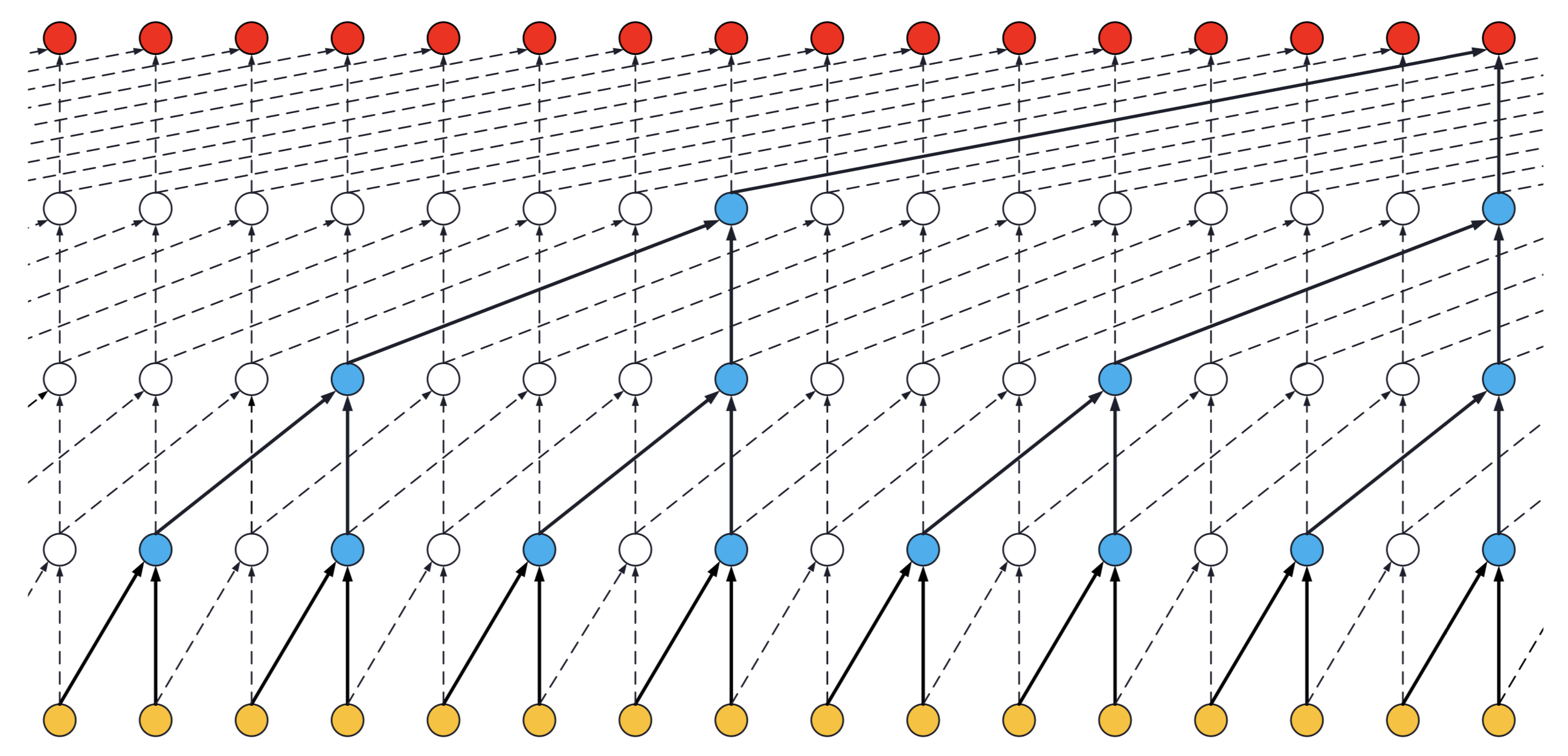 ks = 2, dilations = [1, 2, 4, 8], 1 block
ks = 2, dilations = [1, 2, 4, 8], 1 block
- If a dilated conv net has 2 stacks of residual blocks, you would have the situation below, that is, an increase in the receptive field up to 31:
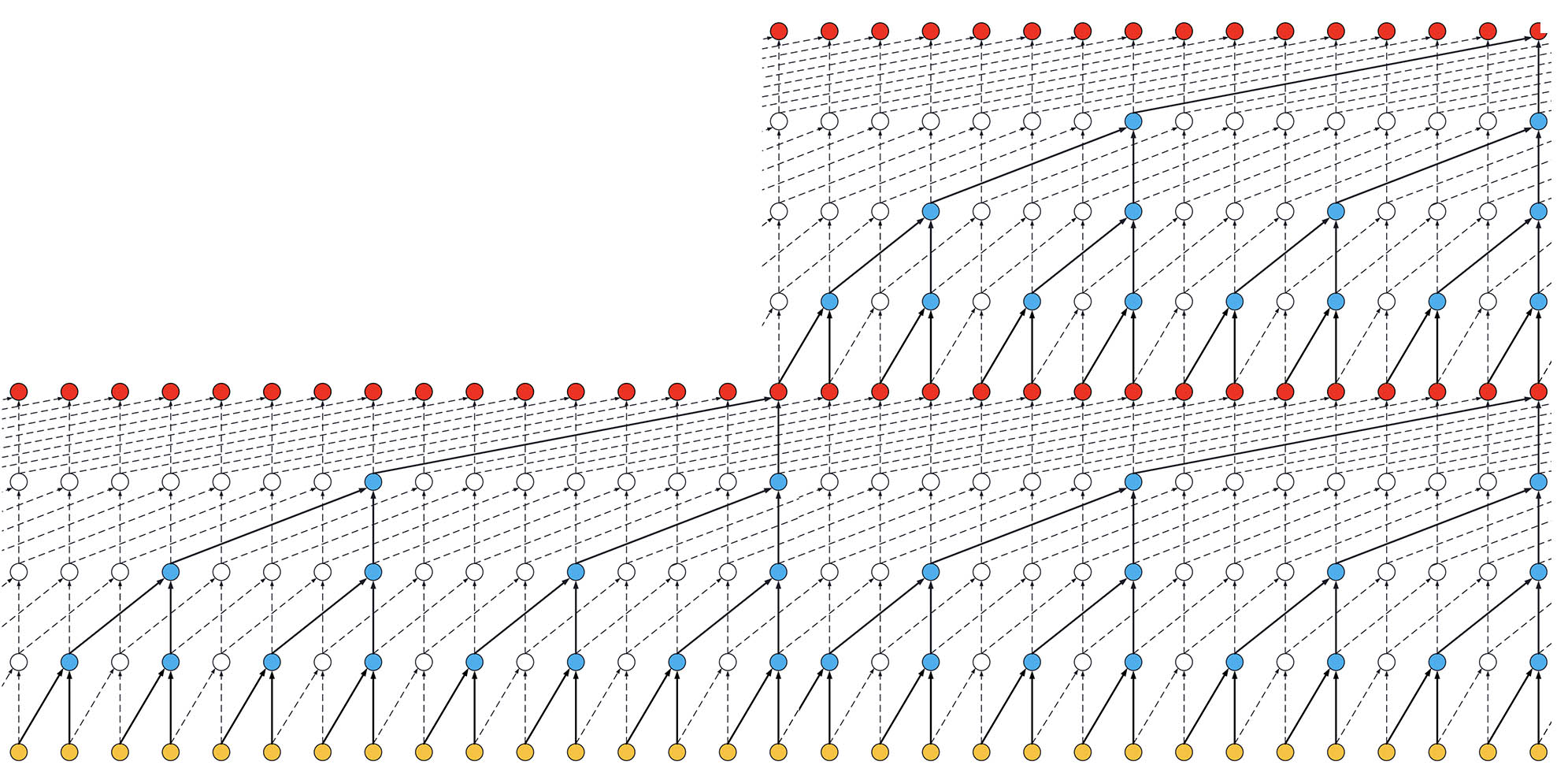 ks = 2, dilations = [1, 2, 4, 8], 2 blocks
ks = 2, dilations = [1, 2, 4, 8], 2 blocks
- If we increased the number of stacks to 3, the size of the receptive field would increase again, such as below:
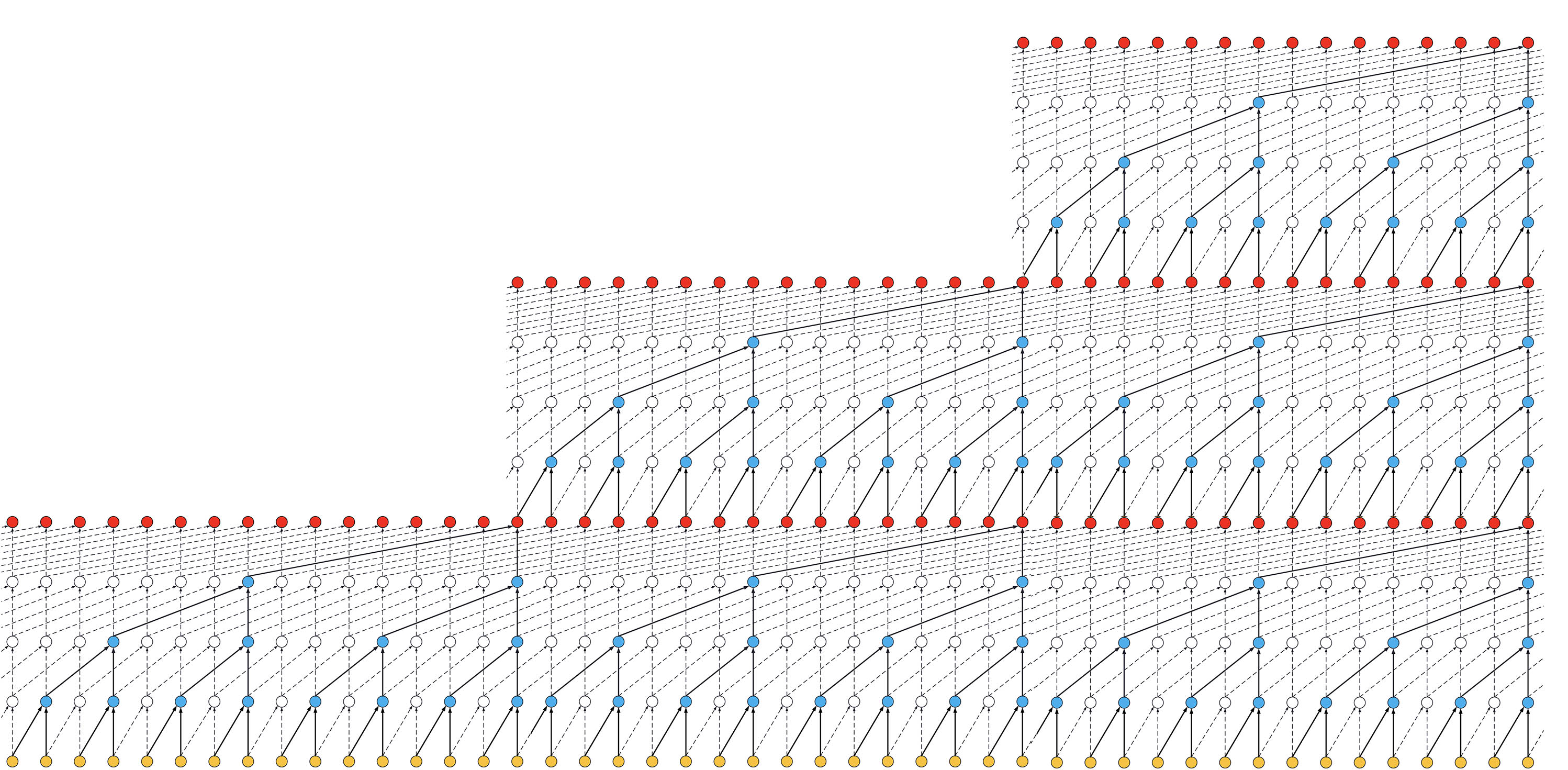 ks = 2, dilations = [1, 2, 4, 8], 3 blocks
ks = 2, dilations = [1, 2, 4, 8], 3 blocks
Making the TCN architecture non-causal allows it to take the future into consideration to do its prediction as shown in the figure below.
However, it is not anymore suitable for real-time applications.
 Non-Causal TCN - ks = 3, dilations = [1, 2, 4, 8], 1 block
Non-Causal TCN - ks = 3, dilations = [1, 2, 4, 8], 1 block
To use a non-causal TCN, specify padding='valid' or padding='same' when initializing the TCN layers.
git clone git@github.com:philipperemy/keras-tcn.git && cd keras-tcn
virtualenv -p python3 venv
source venv/bin/activate
pip install -r requirements.txt
pip install .Once keras-tcn is installed as a package, you can take a glimpse of what is possible to do with TCNs. Some tasks examples are available in the repository for this purpose:
cd adding_problem/
python main.py # run adding problem task
cd copy_memory/
python main.py # run copy memory task
cd mnist_pixel/
python main.py # run sequential mnist pixel taskReproducible results are possible on (NVIDIA) GPUs using the tensorflow-determinism library. It was tested with keras-tcn by @lingdoc and he got reproducible results.
Language modeling remains one of the primary applications of recurrent networks. In this example, we show that TCN can beat LSTM without too much tuning. More here: WordPTB.

TCN vs LSTM (comparable number of weights)
The task consists of feeding a large array of decimal numbers to the network, along with a boolean array of the same length. The objective is to sum the two decimals where the boolean array contain the two 1s.
 Adding Problem Task
Adding Problem Task
782/782 [==============================] - 154s 197ms/step - loss: 0.8437 - val_loss: 0.1883
782/782 [==============================] - 154s 196ms/step - loss: 0.0702 - val_loss: 0.0111
[...]
782/782 [==============================] - 152s 194ms/step - loss: 6.9630e-04 - val_loss: 3.7180e-04
The copy memory consists of a very large array:
- At the beginning, there's the vector x of length N. This is the vector to copy.
- At the end, N+1 9s are present. The first 9 is seen as a delimiter.
- In the middle, only 0s are there.
The idea is to copy the content of the vector x to the end of the large array. The task is made sufficiently complex by increasing the number of 0s in the middle.
 Copy Memory Task
Copy Memory Task
118/118 [==============================] - 17s 143ms/step - loss: 1.1732 - accuracy: 0.6725 - val_loss: 0.1119 - val_accuracy: 0.9796
[...]
118/118 [==============================] - 15s 125ms/step - loss: 0.0268 - accuracy: 0.9885 - val_loss: 0.0206 - val_accuracy: 0.9908
118/118 [==============================] - 15s 125ms/step - loss: 0.0228 - accuracy: 0.9900 - val_loss: 0.0169 - val_accuracy: 0.9933
The idea here is to consider MNIST images as 1-D sequences and feed them to the network. This task is particularly hard because sequences are 28*28 = 784 elements. In order to classify correctly, the network has to remember all the sequence. Usual LSTM are unable to perform well on this task.
 Sequential MNIST
Sequential MNIST
1875/1875 [==============================] - 46s 25ms/step - loss: 0.0949 - accuracy: 0.9706 - val_loss: 0.0763 - val_accuracy: 0.9756
1875/1875 [==============================] - 46s 25ms/step - loss: 0.0831 - accuracy: 0.9743 - val_loss: 0.0656 - val_accuracy: 0.9807
[...]
1875/1875 [==============================] - 46s 25ms/step - loss: 0.0486 - accuracy: 0.9840 - val_loss: 0.0572 - val_accuracy: 0.9832
1875/1875 [==============================] - 46s 25ms/step - loss: 0.0453 - accuracy: 0.9858 - val_loss: 0.0424 - val_accuracy: 0.9862
Testing is based on Tox.
pip install tox
tox
- https://github.com/locuslab/TCN/ (TCN for Pytorch)
- https://arxiv.org/pdf/1803.01271 (An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling)
- https://arxiv.org/pdf/1609.03499 (Original Wavenet paper)
- https://github.com/Baichenjia/Tensorflow-TCN (Tensorflow Eager implementation of TCNs)
@misc{KerasTCN,
author = {Philippe Remy},
title = {Temporal Convolutional Networks for Keras},
year = {2020},
publisher = {GitHub},
journal = {GitHub repository},
howpublished = {\url{https://github.com/philipperemy/keras-tcn}},
}
Special thanks to:
- @alextheseal
- @qlemaire22