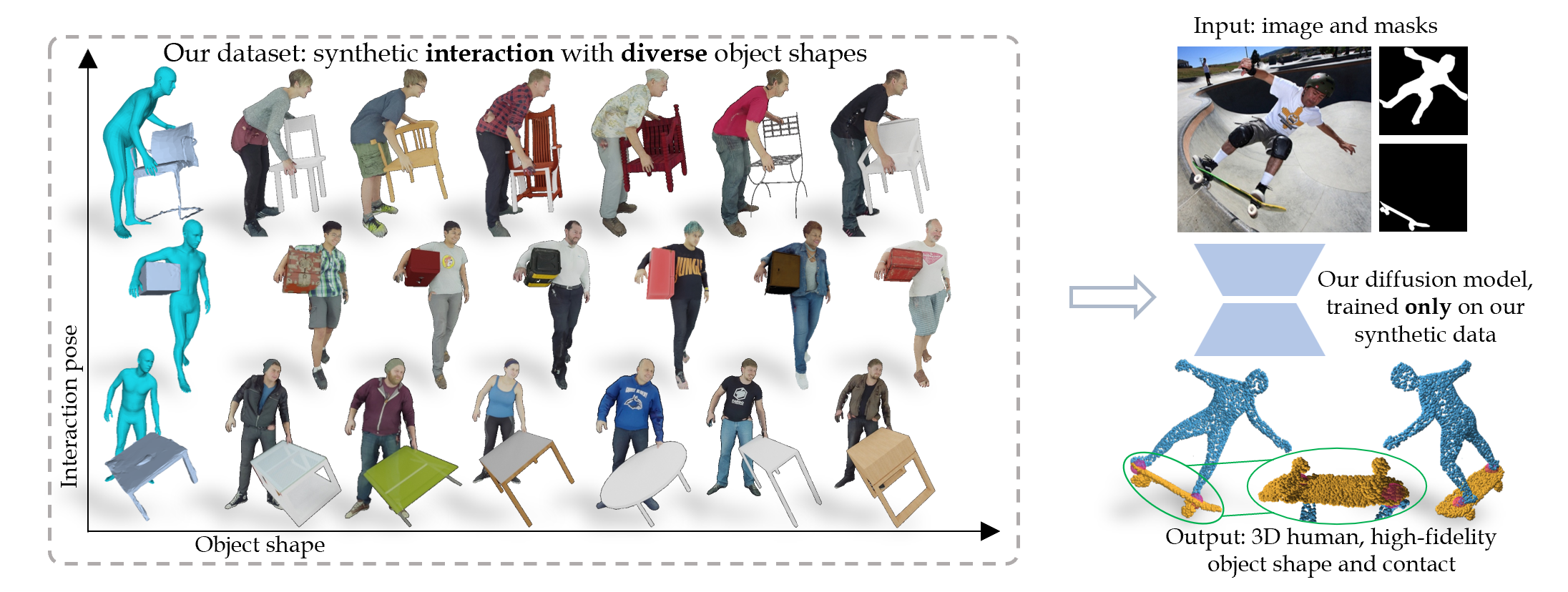
Official implementation for the HDM model of the CVPR24 paper: Template Free Reconstruction of Human-object Interaction with Procedural Interaction Generation
Project Page | ProciGen Dataset | Paper |
For template based reconstruction please see: CHORE, VisTracker.
- Hugging face and Gradio demo.
- Google Colab demo.
- Training and inference.
- Evaluation code.
- June 12, 2024. Add support for using DDIM for inference, the speed is now 10x faster, with minimum affects on performance!
The code is tested on torch=1.12.1+cu113, cuda11.3, debian11. We recommend using anaconda environment:
conda create -n hdm python=3.8
conda activate hdm Required packages can be installed by:
pip install -r pre-requirements.txt # Install pytorch and others
pip install -r requirements.txt # Install pytorch3d from sourceIn case pytorch3d compilation failed, you can tried to install prebuilt wheels. In this case, pytorch should also be reinstalled. The following combination of torch and pytorch3d has been tested to be compatible:
pip install torch==1.11.0+cu113 torchvision==0.12.0+cu113 torchaudio==0.11.0 --extra-index-url https://download.pytorch.org/whl/cu113
pip install fvcore iopath
pip install --no-index --no-cache-dir pytorch3d -f https://dl.fbaipublicfiles.com/pytorch3d/packaging/wheels/py38_cu113_pyt1110/download.htmlHugging face demo:
Google Colab: coming soon.
Gradio demo on your own machine:
Simply run with:
# option 1: original DDPM inference
python app.py
# option 2: 10x faster inference with DDIM:
python app.py run.diffusion_scheduler=ddim run.num_inference_steps=100In case of a headless remote server, you can run python app.py run.share=True to create a temporal public url which you can access the webpage in laptop browser.
Command line demo:
Alternatively, you can run the demo given image path:
python demo.py run.image_path=<RGB image path> dataset.std_coverage=<optional, a value between 3.0 and 3.8> For example: python demo.py run.image_path=$PWD/examples/017450/k1.color.jpg dataset.std_coverage=3.0
Similar to running app.py, you can speed up inference by appending run.diffusion_scheduler=ddim run.num_inference_steps=100 to the end of the command.
We mainly train our model on synthetic ProciGen dataset and test on real BEHAVE data. You can download them here: ProciGen, BEHAVE.
Once downloaded, modify behave_dir and procigen_dir in configs/structured.py to your local path.
We provide a split file including all image names from ProciGen and test image names from BEHAVE, download here.
To train stage 1 segmentation model, you will need to precompute the occupancy of human and object. We provide processed data for ProciGen here. Download and unzip the file.
Then you can run python scripts/process_occ.py -o <unzipped occ files> -p <ProciGen path> to process the downloaded occupancy file.
Alternatively, you can process the sequence using: python scripts/compute_occ.py -s <path to one sequence>.
We train our stage 1 and stage 2 models separately in parallel to reduce training time. You can find example commands in scripts/train.sh. The checkpoint and logs will be saved to outputs.
The data split file can be downloaded from Edmond.
We provide checkpoints for models trained only on synthetic ProciGen, download them from here.
Unzip the file and place them under folder outputs.
For more pretrained models, you can checkout our Huggingface model card.
Specifically, stagex-<obj> means the original stage x model first trained on full ProciGen data and then fine tuned on synthetic data of category <obj>.
stagex-tune means the model first trained on full ProciGen then fine tuned on training set of BEHAVE and InterCap.
We provide example command to run batch inference at scripts/test.sh. Similar to training, the two stages are also run separately to reduce runtime. The example commands are
configured to run inference on the pretrained checkpoints.
Save as the training setup, the split file can be downloaded from Edmond.
After inference is done, results can be evaluated with:
python eval/eval_separate.py -pr outputs/stage2/single/<save_name>/pred -gt outputs/stage2/single/<save_name>/gt -split configs/splits/behave-test.json The numbers will be saved to ./results.
From June 12, 2024 on, we support DDIM at inference time, which is 10x faster. The performance remains similar, we report the results on BEHAVE and InterCap below (F-score@0.01m):
| BEHAVE | Human | Object | Combined |
|---|---|---|---|
| DDPM | 0.3477 | 0.4351 | 0.4110 |
| DDIM | 0.3533 | 0.4366 | 0.4170 |
| InterCap | Human | Object | Combined |
|---|---|---|---|
| DDPM | 0.3851 | 0.4928 | 0.4530 |
| DDIM | 0.3835 | 0.4817 | 0.4477 |
Note here the models are trained on synthetic ProciGen only, corresponding to Ours synth. only in our paper Table 2. We run DDIM for 100 steps in total with eta=1.0.
If you use the code, please cite:
@inproceedings{xie2023template_free,
title = {Template Free Reconstruction of Human-object Interaction with Procedural Interaction Generation},
author = {Xie, Xianghui and Bhatnagar, Bharat Lal and Lenssen, Jan Eric and Pons-Moll, Gerard},
booktitle = {IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2024},
}
This project leverages the following excellent works, we thank the authors for open-sourcing their code:
Please see LICENSE.