Baseado em Projeto PI3 de Lucas Odair Silva.

Projeto da placa eletrônica de potência para o acionamento de um Buggy 4x4. Um conector de 26-vias faz a conexão das seguintes placas:
- Controle independente dos motores (lado esquerdo e lado direito)
- Sensores de velocidade Encoder
- Monitoramento de bateria de LiPo
- Sensor de linha dual
- Sensor ultrassom
- Comunicação Bluetooth (UART)

Circuito final de alimentação dos motores, com queda de 0,4V de tensão na carga em relação a VCC e corrente de polarização externa de 640pA, não exigindo muita corrente do microcontrolador.



Para alimentar o carro foram escolhidas duas baterias de LIPO, de 3,7V e 1200mAh, conectadas em série, o que resulta em 7,4V de tensão.
Como o conjunto de baterias tem como tensão 7,4V na saída, é necessário baixar a tensão para níveis aceitáveis para o microcontrolador e modulo bluetooth, no caso foi usado um regulador ajustável Step-up-down, por questão de disponibilidade, mesmo esse sendo superdimensionado para a aplicação em questão, já que suporta correntes de até 5A e nesse caso não passa de 200mA.

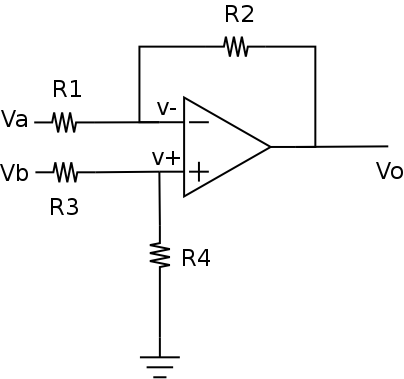
Como regra geral, não se pode descarregar uma bateria abaixo de uma certa tensão, com as usadas nesse projeto não é diferente, não sendo recomendado baixar a tensão da marca dos 3V, como o sistema possui duas baterias é necessário medir a tensão delas individualmente. O conversor analógico digital do microcontrolador tem como tensão base 3V, então é preciso baixar as tensões para menos de 3V, o circuito usado para isso é o diferencial com ampop, que pode dar um ganho menor que 1, sem usar tensão negativa. O Ampop escolhido foi o LM324, com ganho de 1/3 para a tensão superior (bateria 1 em serie com a bateria 2), e de 2/3 para a tensão media (bateria 1).