
In this project, I will write a software pipeline to identify the lane boundaries in a video from a front-facing camera on a car. The camera calibration images, test road images, and project videos are available in the project repository.
The complete pipeline can be found here.
My pipeline consisted of 10 steps:
- Import and initialize the packages needed in the project,
- Compute the camera calibration matrix and distortion coefficients given a set of chessboard images,
- Apply a distortion correction to raw images,
- Use color transforms, gradients, etc., to create a thresholded binary image,
- Apply a perspective transform to rectify binary image ("birds-eye view"),
- Detect lane pixels and fit to find the lane boundary,
- Determine the curvature of the lane, and vehicle position with respect to center,
- Warp the detected lane boundaries back onto the original image,
- Display lane boundaries and numerical estimation of lane curvature and vehicle position,
- Run pipeline in a video.
It is not good to reinvent the wheel every time. That's why I have chosen to use some well known libraries:
- OpenCV - an open source computer vision library,
- Matplotbib - a python 2D plotting libray,
- Numpy - a package for scientific computing with Python,
- MoviePy - a Python module for video editing.
The complete code for this step can be found in the first code cell of this Jupyter notebook.
The next step is to perform a camera calibration. A set of chessboard images will be used for this purpose.
I have defined the calibrate_camera function which takes as input parameters an array of paths to chessboards images, and the number of inside corners in the x and y axis.
For each image path, calibrate_camera:
- reads the image by using the OpenCV cv2.imread function,
- converts it to grayscale usign cv2.cvtColor,
- find the chessboard corners usign cv2.findChessboardCorners
Finally, the function uses all the chessboard corners to calibrate the camera by invoking cv2.calibrateCamera.
The values returned by cv2.calibrateCamera will be used later to undistort our video images.
The complete code for this step can be found in the second code cell of this Jupyter notebook.
Another OpenCv funtion, cv2.undistort, will be used to undistort images.
Below, it can be observed the result of undistorting one of the chessboard images:

The complete code for this step can be found in the third code cell of this Jupyter notebook.
In this step, we will define the following funtions to calculate several gradient measurements (x, y, magnitude, direction and color).
- Calculate directional gradient:
abs_sobel_thresh(). - Calculate gradient magnitude:
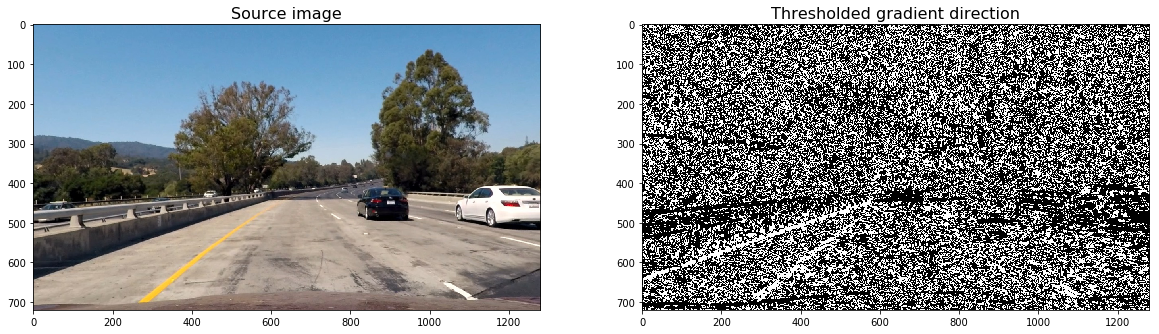
mag_thres(). - Calculate gradient direction:
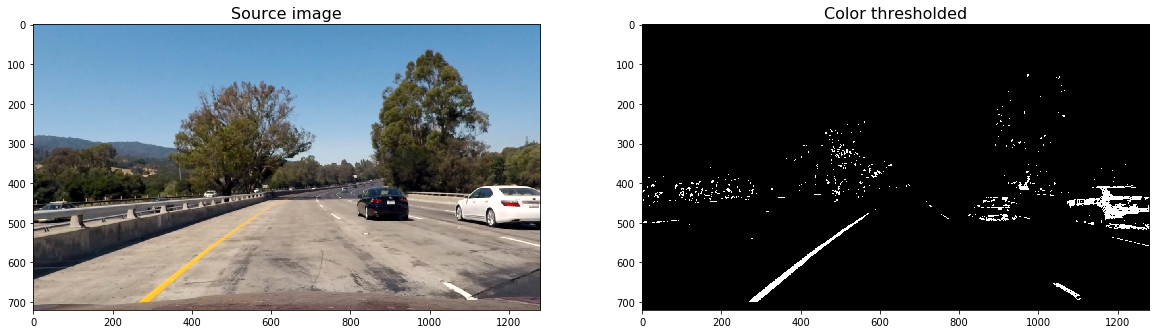
dir_thresh(). - Calculate color threshold:
col_thresh().
Then, combine_threshs() will be used to combine these thresholds, and produce the image which will be used to identify lane lines in later steps.
Below, I have copied the result of applying each function to a sample image:
-
Calculate directional gradient for x and y orients:
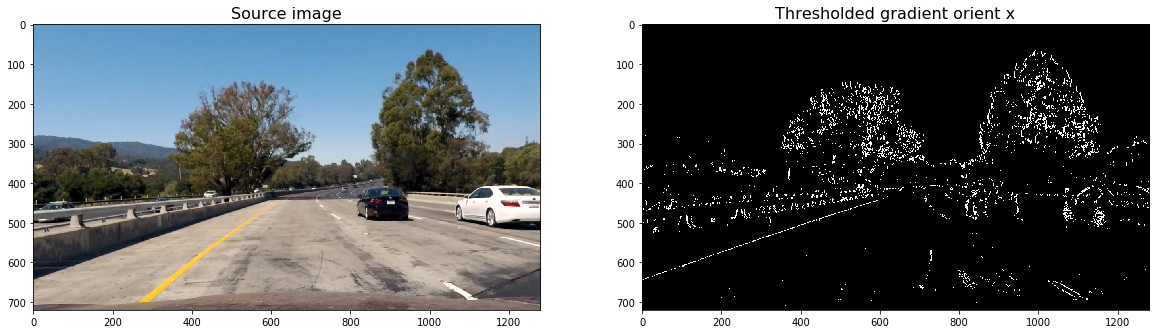
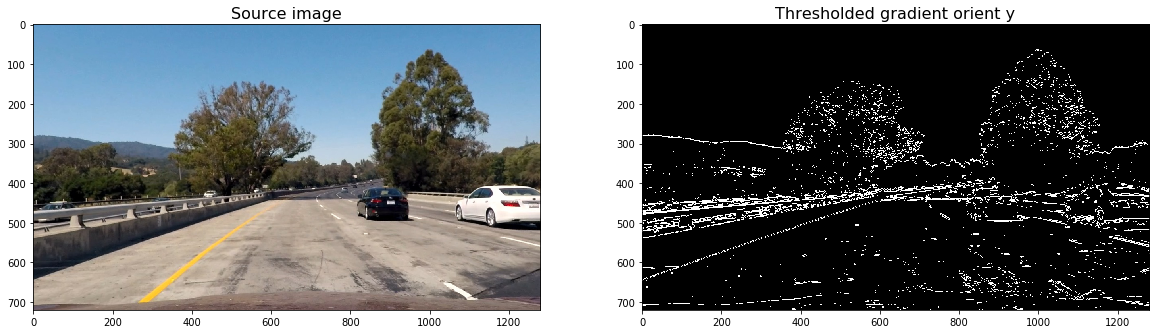
-
Calculate gradient magnitude

-
Calculate gradient direction
-
Calculate color threshold





The output image resulting of combining each thresh can be observed below:

An in-depth explanation about how these functions work can be found at the Lesson 15: Advanced Techniques for Lane Finding of Udacity's Self Driving Car Engineer Nanodegree.
The next step in our pipeline is to transform our sample image to birds-eye view.
The process to do that is quite simple:
- First, you need to select the coordinates corresponding to a trapezoid in the image, but which would look like a rectangle from birds_eye view.
- Then, you have to define the destination coordinates, or how that trapezoid would look from birds_eye view.
- Finally, Opencv function cv2.getPerspectiveTransform will be used to calculate both, the perpective transform M and the inverse perpective transform _Minv.
- M and Minv will be used respectively to warp and unwarp the video images.
Please find below the result of warping an image after transforming its perpective to birds-eye view:

The code for the warp() function can be found below:
# Define perspective transform function
def warp(img, src_coordinates=None, dst_coordinates=None):
# Define calibration box in source (original) and destination (desired or warped) coordinates
img_size = (img.shape[1], img.shape[0])
if src_coordinates is None:
src_coordinates = np.float32(
[[280, 700], # Bottom left
[595, 460], # Top left
[725, 460], # Top right
[1125, 700]]) # Bottom right
if dst_coordinates is None:
dst_coordinates = np.float32(
[[250, 720], # Bottom left
[250, 0], # Top left
[1065, 0], # Top right
[1065, 720]]) # Bottom right
# Compute the perspective transfor, M
M = cv2.getPerspectiveTransform(src_coordinates, dst_coordinates)
# Compute the inverse perspective transfor also by swapping the input parameters
Minv = cv2.getPerspectiveTransform(dst_coordinates, src_coordinates)
# Create warped image - uses linear interpolation
warped = cv2.warpPerspective(img, M, img_size, flags=cv2.INTER_LINEAR)
return warped, M, MinvPlease notice that the function does not return the unwarped version of the image. That would be performed in a later step.
In order to detect the lane pixels from the warped image, the following steps are performed.
- First, a histogram of the lower half of the warped image is created. Below it can be seen the histogram and the code used to produce it.

def get_histogram(img):
return np.sum(img[img.shape[0]//2:, :], axis=0)
# Run de function over the combined warped image
combined_warped = warp(combined)[0]
histogram = get_histogram(combined_warped)
# Plot the results
plt.title('Histogram', fontsize=16)
plt.xlabel('Pixel position')
plt.ylabel('Counts')
plt.plot(histogram)- Then, the starting left and right lanes positions are selected by looking to the max value of the histogram to the left and the right of the histogram's mid position.
- A technique known as Sliding Window is used to identify the most likely coordinates of the lane lines in a window, which slides vertically through the image for both the left and right line.
- Finally, usign the coordinates previously calculated, a second order polynomial is calculated for both the left and right lane line. Numpy's function np.polyfit will be used to calculate the polynomials.
Please find below the result of applying the detect_lines() function to the warped image:

The complete code for this step can be found in the nineteenth code cell of this Jupyter notebook.
Once you have selected the lines, it is reasonable to assume that the lines will remain there in future video frames.
detect_similar_lines() uses the previosly calculated line_fits to try to identify the lane lines in a consecutive image. If it fails to calculate it, it invokes detect_lines() function to perform a full search.
At this moment, some metrics will be calculated: the radius of curvature and the car offset.
The code is quite self-explicative, so I'll leave to the reader its lecture. For further information, please refer to Lesson 15: Advanced Techniques for Lane Finding of Udacity's Self Driving Car Engineer Nanodegree.
def curvature_radius (leftx, rightx, img_shape, xm_per_pix=3.7/800, ym_per_pix = 25/720):
ploty = np.linspace(0, img_shape[0] - 1, img_shape[0])
leftx = leftx[::-1] # Reverse to match top-to-bottom in y
rightx = rightx[::-1] # Reverse to match top-to-bottom in y
# Fit a second order polynomial to pixel positions in each fake lane line
left_fit = np.polyfit(ploty, leftx, 2)
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fit = np.polyfit(ploty, rightx, 2)
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]
# Define conversions in x and y from pixels space to meters
ym_per_pix = 25/720 # meters per pixel in y dimension
xm_per_pix = 3.7/800 # meters per pixel in x dimension
# Fit new polynomials to x,y in world space
y_eval = np.max(ploty)
left_fit_cr = np.polyfit(ploty*ym_per_pix, leftx*xm_per_pix, 2)
right_fit_cr = np.polyfit(ploty*ym_per_pix, rightx*xm_per_pix, 2)
# Calculate the new radii of curvature
left_curverad = ((1 + (2*left_fit_cr[0]*y_eval*ym_per_pix + left_fit_cr[1])**2)**1.5) / np.absolute(2*left_fit_cr[0])
right_curverad = ((1 + (2*right_fit_cr[0]*y_eval*ym_per_pix + right_fit_cr[1])**2)**1.5) / np.absolute(2*right_fit_cr[0])
# Now our radius of curvature is in meters
return (left_curverad, right_curverad)def car_offset(leftx, rightx, img_shape, xm_per_pix=3.7/800):
## Image mid horizontal position
mid_imgx = img_shape[1]//2
## Average lane horizontal position
mid_lanex = (np.mean((leftx + rightx)/2))
## Horizontal car offset
offsetx = (mid_imgx - mid_lanex) * xm_per_pix
return offsetxLet's recap. We have already identified the lane lines, its radius of curvature and the car offset.
The next step will be to draw the lanes on the original image:
- First, we will draw the lane lines onto the warped blank version of the image.
- The lane will be drawn onto the warped blank image using the Opencv function cv2.fillPoly.
- Finally, the blank will be warped back to original image space using inverse perspective matrix (Minv).
This code is implemented in the draw_lane() function, which can be found at the 27th cell of this Jupyter notebook.
An example of its output can be observed below:

The next step is to add metrics to the image. I have created a method named add_metrics() which receives an image and the line points and returns an image which contains the left and right lane lines radius of curvature and the car offset.
This function makes use of the previously defined curvature_radius() and car_offset() function.
Please find below the output image after invoking add_metrics:

This function can be found at the 29th cell of this Jupyter notebook.
In this step, we will use all the previous steps to create a pipeline that can be used on a video.
The first thing I have done is to create the ProcessImage class. I have decided to use a class instead of a method because it would let me calibrate the camera when initializing the class and also keep some track of the previously detected lines.
Please notice that this is a very basic implementation. I have not implemented sanity checks nor lines smoothing yet. I will implement that in the future. I think the final results are good enough and I am running out of time for this term (I have till 28th of May to complete it).
class ProcessImage:
def __init__(self, images):
# Make a list of calibration images
images = glob.glob(images)
# Calibrate camera
self.ret, self.mtx, self.dist, self.rvecs, self.tvecs = calibrate_camera(images)
self.lines_fit = None
def __call__(self, img):
# Undistord image
img = cv2.undistort(img, mtx, dist, None, mtx)
# Calculate directional gradient
grad_binary = abs_sobel_thresh(img, orient='x', sobel_kernel=15, thresh=(30, 100))
# Calculate gradient magnitude
mag_binary = mag_thres(img, sobel_kernel=15, thresh=(50, 100))
# Calculate gradient direction
dir_binary = dir_thresh(img, sobel_kernel=15, thresh=(0.7, 1.3))
# Calculate color threshold
col_binary = col_thresh(img, thresh=(170, 255))
# Combine all the thresholds to identify the lane lines
combined = combine_threshs(grad_x, grad_y, mag_binary, dir_binary, col_binary, ksize=15)
# Apply a perspective transform to rectify binary image ("birds-eye view")
src_coordinates = np.float32(
[[280, 700], # Bottom left
[595, 460], # Top left
[725, 460], # Top right
[1125, 700]]) # Bottom right
dst_coordinates = np.float32(
[[250, 720], # Bottom left
[250, 0], # Top left
[1065, 0], # Top right
[1065, 720]]) # Bottom right
combined_warped, _, Minv = warp(combined, src_coordinates, dst_coordinates)
self.lines_fit, left_points, right_points, out_img = detect_similar_lines(combined_warped, self.lines_fit, return_img=True)
# Warp the detected lane boundaries back onto the original image.
img_lane = draw_lane(img, combined_warped, left_points, right_points, Minv)
# Add metrics to the output img
out_img = add_metrics(img_lane, leftx=left_points[0], rightx=right_points[0])
return out_imgI have used MoviePy's VideoFileClip class to read the input video. Then, I have used fl_image to process each frame with our ProcessImage class.
Finally, I have written the output video usign 'https://zulko.github.io/moviepy/ref/VideoClip/VideoClip.html#moviepy.video.VideoClip.VideoClip.write_videofile'
input_video = './project_video.mp4'
output_video = './project_video_solution.mp4'
## You may uncomment the following line for a subclip of the first 5 seconds
#clip1 = VideoFileClip(input_video).subclip(0,5)
clip1 = VideoFileClip(input_video)
# Process video frames with our 'process_image' function
process_image = ProcessImage('./camera_cal/calibration*.jpg')
white_clip = clip1.fl_image(process_image)
%time white_clip.write_videofile(./writeup_imgs/output_video, audio=False)The output video can be found here. Please notice that it is stored using Git LFS.
This has been a really challenging project and I am quite happy with the results.
Nevertheless, there is still some room for improvements in the ProcessImage class:
- Keep track of the last several detections of the lane lines were and what the curvature was, so it can properly be treated new detections:
- Perform some sanity checks to confirm that the detected lane lines are real:
- Checking that they have similar curvature,
- Checking that they are separated by approximately the right distance horizontally,
- Checking that they are roughly parallel.
- Smoothing:
- Even when everything is working, line detections will jump around from frame to frame a bit and it can be preferable to smooth over the last n frames of video to obtain a cleaner result. Each time a new high-confidence measurement is calculated, it can be appended to the list of recent measurements and then take an average over n past measurements to obtain the lane position to draw onto the image.
I will implement these changes in the future, but I am running out of time to complete term 1, so I have decided to leave them for the next weeks.
Finally, the pipeline might fall if a white car is too close to the left or right lanes, and also when a white car is in front of our car and quite close to us.
I really hope you have enjoyed this lecture as much as I have done writting it for you.