-
参考 自主无人机竞速模拟器使用说明 配置好模拟器并启动
-
确保已安装了 Nvidia 驱动
安装docker
sudo apt-get install ca-certificates gnupg lsb-releasesudo mkdir -p /etc/apt/keyringscurl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo gpg --dearmor -o /etc/apt/keyrings/docker.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/etc/apt/keyrings/docker.gpg] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/nullsudo apt-get updatesudo apt-get install docker-ce docker-ce-cli containerd.io docker-compose-plugin
安装nvidia-container-toolkit
distribution=$(. /etc/os-release;echo $ID$VERSION_ID)curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.listsudo apt-get update && sudo apt-get install -y nvidia-container-toolkitsudo systemctl restart docker
设置用户组,消除 sudo 限制
sudo groupadd dockersudo gpasswd -a $USER docker- 注销账户并重新登录使新的用户组生效
- sudo service docker restart
-
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt install curlcurl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -sudo apt updatesudo apt install ros-noetic-desktop-fullsudo apt install python3-catkin-tools
-
本次比赛中的模拟器使用 ROS 进行通讯,选手需要编写含有控制程序的ros功能包操控无人机完成目标,该ros功能包需要封装在docker镜像中进行提交。建议先在主机下开发完相应程序后在进行程序的docker封装,流程如下
进入文件目录
cd /path/to/IntelligentUAVChampionshipBase/basic_dev
开发案例完成功能设计与程序开发并根据需要修改 Dockerfile 后,构建镜像
docker build -t basic_dev .
导出镜像
docker image save [镜像:TAG] > test.tar
在主机工作目录下会出现 test.tar 文件,该文件即为可提交镜像- 服务器会在外部随机分配ip给容器,不能在镜像中的启动文件中提供 ROS_IP 和 ROS_MASTER_URI 这两个环境变量,否则服务器与容器将无法连接
- 镜像中的程序应在镜像启动后自动开启
- 镜像程序不允许使用GUI(X11等)功能,程序案例中的GUI程序仅供调试使用
-
该镜像包含有ros-noetic-desktop-focal以及相关的必要ros组件。程序中展示了如何模拟器进行数据交互
进入文件目录
cd /path/to/IntelligentUAVChampionshipBase/basic_dev
构建镜像
docker build -t basic_dev .
启动docker镜像
./run_basic_dev.sh
当看到如下图,说明容器启动成功,程序可接受到模拟器传出的数据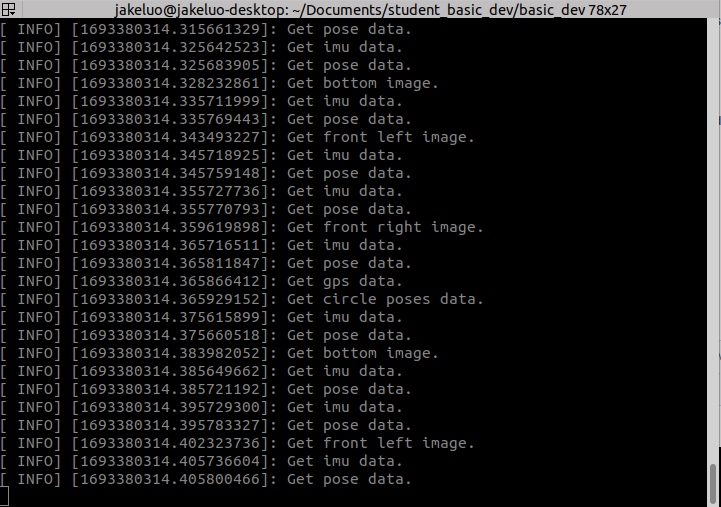
该镜像实现了基于速度控制接口的PD控制器。程序会控制无人机沿着一个固定椭圆路径飞行
进入文件目录
cd /path/to/IntelligentUAVChampionshipBase/pos_ctrl
构建镜像
docker build -t pos_ctrl .
启动docker镜像
./run_posctrl.sh
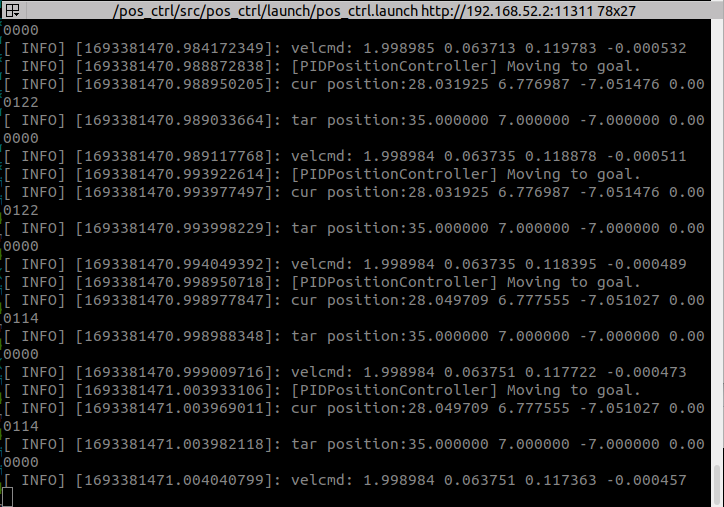
当看到如下图,说明容器启动成功,front_left窗口展示无人机的左相机视角,终端中展示无人机的实时位姿,目标位姿与实时速度指令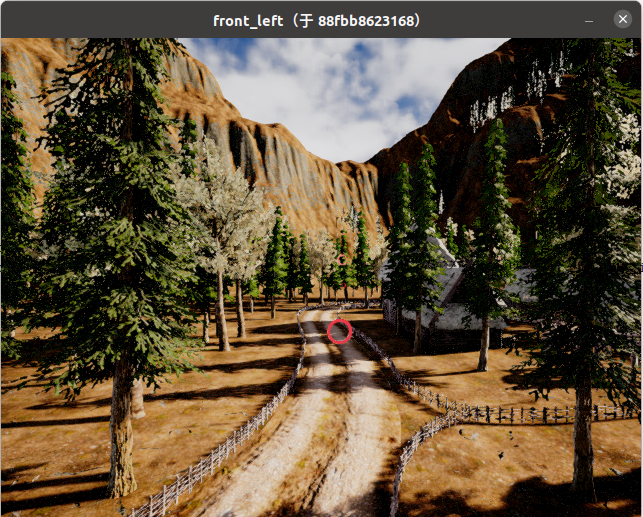
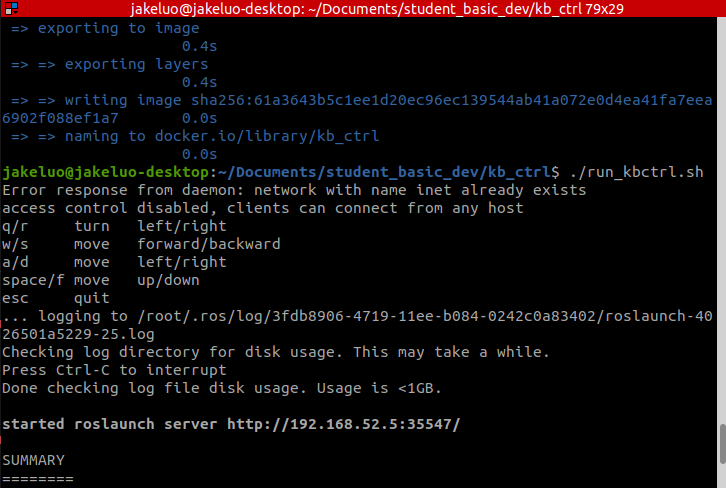
用X11协议获取键盘事件,并基于pd控制器构建的模拟无人机遥控器,实现了无人机的前后左右上下移动以及左右旋转。
q/e: 左/右旋转
w/s: 前/后移动
a/d: 左/右移动
space/f: 上/下移动
esc: 退出键盘控制进入文件目录
cd /path/to/IntelligentUAVChampionshipBase/kb_ctrl
构建镜像
docker build -t kb_ctrl .
启动docker镜像
./run_kbctrl.sh
当看到如下图,说明容器启动成功,front_left窗口展示无人机的左相机视角,终端中输出键位说明。此时键盘的被占用,仅能够用于控制无人机。当按下esc后键盘被释放
-
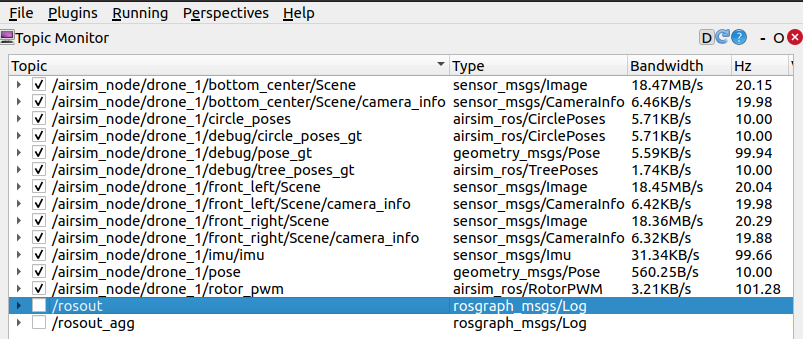
用于获取数据的可订阅的主题
- 下视相机
/airsim_node/drone_1/bottom_center/Scene - 双目左rgb图
/airsim_node/drone_1/front_left/Scene - 双目右rgb图
/airsim_node/drone_1/front_right/Scene - imu数据
/airsim_node/drone_1/imu/imu - 无人机状态真值
/airsim_node/drone_1/debug/pose_gt - gps数据
/airsim_node/drone_1/pose - 障碍圈位姿真值
/airsim_node/drone_1/debug/circle_poses_gt - 障碍圈参考位姿
/airsim_node/drone_1/circle_poses - 赛道中生成的树的真实位置
/airsim_node/drone_1/debug/tree_poses_gt - 电机输入PWM信号(0:右前, 1:左后, 2:左前, 3:右后)
/airsim_node/drone_1/rotor_pwm
用于发送指令的主题
- 姿态控制
/airsim_node/drone_1/pose_cmd_body_frame - 速度控制
/airsim_node/drone_1/vel_cmd_body_frame - 角速度推力控制
/airsim_node/drone_1/angle_rate_throttle_frame
可用服务
- 起飞
/airsim_node/drone_1/takeoff - 降落
/airsim_node/drone_1/land - 重置
/airsim_node/reset
服务器仅开放 下视相机, 双目左rgb图, 双目右rgb图, gps数据, 障碍圈参考位姿, imu数据, 规则手册中未提及的话题(无人机状态真值, 障碍圈位姿真值, 赛道中生成的树的真实位置, 电机输入PWM信号)仅供调试程序使用。
- 下视相机





每个案例都包含有 airsim_ros 包, 当使用 _catkin_make_时, 由于是多线程编译, airsim_ros 还没编译完成导致案例包找不到,此时再次使用 catkin_make 进行编译即可解决问题。
