This is a project to turn your Roomba into WiFi-RC car. Based on my previous projects.
RoombaWifiController: This project does not use camera streaming.
MKZ4Camera: This is a project to run WiFi RC car MKZ-4 with camera streaming, which I worked on when I was at Cerevo Inc.



The camera streaming and communication to the Roomba is done by ESP32 with camera module. Basically This project should run on any ESP32 with camera module, but I have used Timer Camera F from M5 since it has fish eye lens.
The communication between ESP32 and Roomba is done over UART, which you can access from the Mini-DIN connector on the Roomba. ESP32 module is also powered from Roomba's battery via tiny DC-DC converter.
The movement is controlled from web interface served from ESP32's simple http server. Control value is communicated over Websocket.
PlatformIO with Arduino Built on PlatformIO Version 6.1.6 ESP32 for Arduino v6.1.0
Run "platformio run" at project root directory.
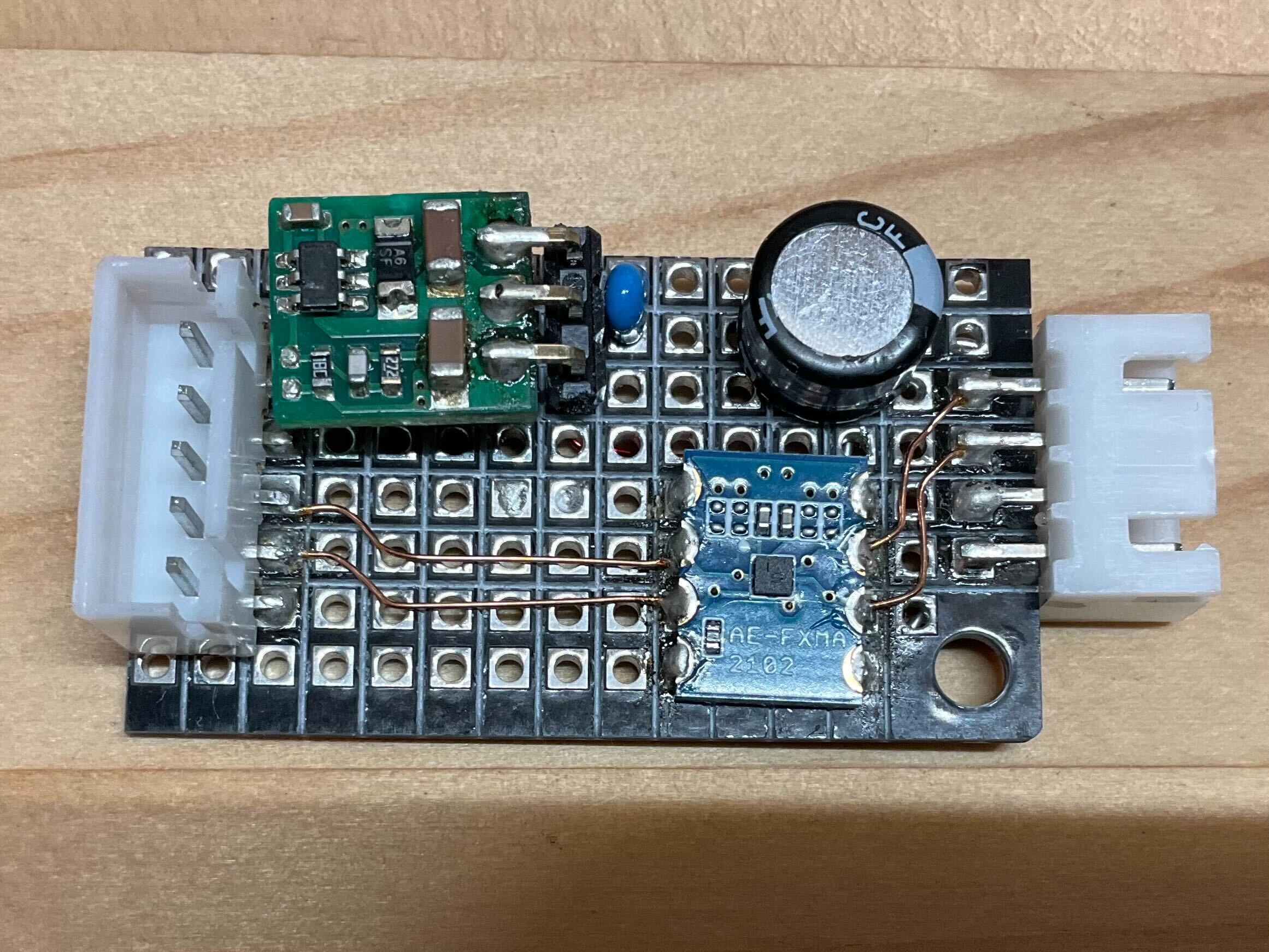
- FXMA2102
- Due to circuit level of ESP32(3.3V) and Roomba(5.0V) I needed to place level converter. Actually I am supplying 5V to ESP32 side too, since there is no 3.3V out from Timer CAM F module. ESP32 is 5V tolerant, so this module is simply working as a UART buffer.
- VX07805-500
- Power supply for the ESP32 module. This needs to be a DCDC, since the Roomba side can only supply up to 200mA and ESP32 can sometimes consumes much larger current.
- oi.h
- iRobot Open Interface packet definition. Based on the Roomba-Butler Belvedere project by wolffan;.
- Roomba.h / Roomba.cpp
- Roomba interface
- app_httpd.cpp
- Http and Websocket server.
- camera_index.h / camera_index.html
- Web interface html text stored as string.
No additional library is required.
The official M5 Timer Camera F info
official CameraWebServer.ino sample
The original oi.h was referenced from the Roomba-Butler Belvedere project by wolffan.
[] Clean up app_httpd.cpp and html file. [] Detailed documentation for circuit board. [] Build instruction?