An implementation of Merel et al.'s paper on generative adversarial imitation learning (GAIL) using motion capture (MoCap) data:
Learning human behaviors from motion capture by adversarial imitation
Josh Merel, Yuval Tassa, Dhruva TB, Sriram Srinivasan, Jay Lemmon, Ziyu Wang, Greg Wayne, Nicolas Heess
arXiv preprint arXiv:1707.02201, 2017
This code is based on an earlier version developed by Ruben Villegas.
This repo contains one submodule (baselines), so make sure you clone with --recursive:
git clone --recursive https://github.com/ywchao/merel-mocap-gail.gitMake sure the following are installed.
-
Our own branch of baselines provided as a submodule
-
Change the directory:
cd baselines -
Go through the installation steps in this README without re-cloning the repo.
-
-
An old verion of dm_control provided as a submodule
-
Change the directory:
cd dm_control -
Go through the installation steps in this README without re-cloning the repo. This requires the installation of MuJoCo. Also make sure to install the cloned verion:
pip install .
Note that we have only tested on this version. The code might work with newer versions but it is not guaranteed.
-
-
Download the CMU MoCap dataset:
./scripts/download_cmu_mocap.sh
This will populate the
datafolder withcmu_mocap. -
Preprocess data. We use the walk sequences from subject 8 as described in the paper.
./scripts/data_collect.sh
The output will be saved in
data/cmu_mocap.npz. -
Visualize the processed MoCap sequences in dm_control:
./scripts/data_visualize.sh
The output will be saved in
data/cmu_mocap_vis. -
Start training:
./scripts/train.sh 0 1
Note that:
- The first argument sets the random seed, and the second argument sets the number of used sequences.
- For now we use only sequence 1. We will show using all sequences in later steps.
- The command will run training with random seed 0. In practice we recommend running multiple training jobs with different seeds in parallel, as the training outcome is often sensitive to the seed value.
The output will be saved in
output. -
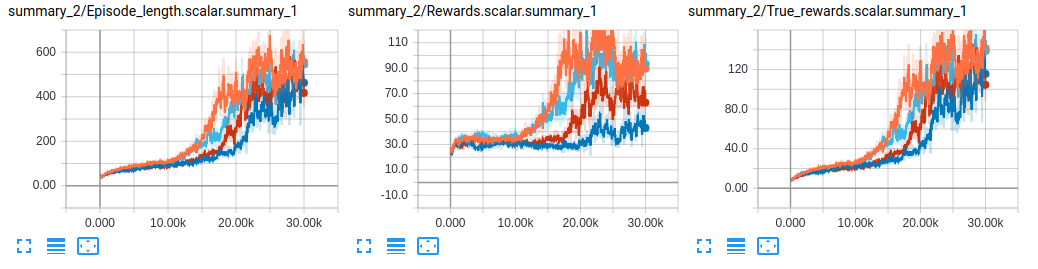
Monitor training with TensorBoard:
tensorboard --logdir=output --port=6006
Below are the curves of episode length, rewards, and true rewards, obtained with four different random seeds:
-
Visualize trained humanoid:
./scripts/visualize.sh \ output/trpo_gail.obs_only.transition_limitation_1.humanoid_CMU_run.g_step_3.d_step_1.policy_entcoeff_0.adversary_entcoeff_0.001.seed_0.num_timesteps_5.00e+07/checkpoints/model.ckpt-30000 \ output/trpo_gail.obs_only.transition_limitation_1.humanoid_CMU_run.g_step_3.d_step_1.policy_entcoeff_0.adversary_entcoeff_0.001.seed_0.num_timesteps_5.00e+07/vis_model.ckpt-30000.mp4 \ 0 \ 1
The arguments are the model path, output video (mp4) file path, random seed, and number of used sequences.
Below is a sample visualization:
-
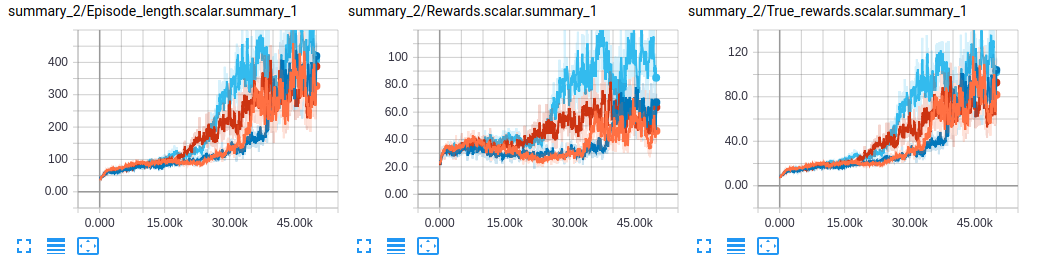
If you want to train with all sequences from subject 8. This can be done by replacing
1by-1in step 4:./scripts/train.sh 0 -1
Similarly, for visualization, replace
1by-1and update the paths:./scripts/visualize.sh \ output/trpo_gail.obs_only.transition_limitation_-1.humanoid_CMU_run.g_step_3.d_step_1.policy_entcoeff_0.adversary_entcoeff_0.001.seed_0.num_timesteps_5.00e+07/checkpoints/model.ckpt-50000 \ output/trpo_gail.obs_only.transition_limitation_-1.humanoid_CMU_run.g_step_3.d_step_1.policy_entcoeff_0.adversary_entcoeff_0.001.seed_0.num_timesteps_5.00e+07/vis_model.ckpt-50000.mp4 \ 0 \ -1
Note that training takes longer to converge when using all sequences:
A sample visualization: