This is an unofficial implementation of CVPR 18 paper "LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image". Official layout dataset are all converted to .png and pretrained models are converted to pytorch state-dict.
What difference from official:
- Architecture: Only joint bounday branch and corner branch are implemented as the paper states that "Training with 3D regressor has a small impact".
- Pre-processing: implementation of line segment detector and pano image alignment are converted from matlab to python in
pano.pyandpano_lsd_align.py. - Post-processing: no 3D layout optimization. Alternatively, this repo smooths the probability map before peak finding and find it help improve testing evaluation metric.
Sampled visualization from testing data:

- Python 3
- pytorch>=0.4.1
- numpy
- scipy
- Pillow
- opencv-python>=3.1 (for pre-processing)
- Download offical data and pretrained model as below
/pytorch-layoutnet
/data
| /origin
| /data (download and extract from official)
| /gt (download and extract from official)
/ckpt
/panofull_*_pretrained.t7 (download and extract from official)
- Execute
python torch2pytorch_data.pyto convertdata/origin/**/*todata/train,data/validanddata/testfor pytorch data loader. Under these folder,img/contains all raw rgb.pngwhileline/,edge/,cor/contain preprocessed Manhattan line segment, ground truth boundary and ground truth corner respectively. - Use
torch2pytorch_pretrained_weight.pyto convert official pretrained pano model toencoder,edg_decoder,cor_decoderpytorchstate_dict(seepython torch2pytorch_pretrained_weight.py -hfor more detailed). examples:- to convert layout pretrained only
python torch2pytorch_pretrained_weight.py --torch_pretrained ckpt/panofull_joint_box_pretrained.t7 --encoder ckpt/pre_full_encoder.pth --edg_decoder ckpt/pre_full_edg_decoder.pth --cor_decoder ckpt/pre_full_cor_decoder.pth - to convert full pretrained (layout regressor branch will be ignored)
python torch2pytorch_pretrained_weight.py --torch_pretrained ckpt/panofull_joint_box_pretrained.t7 --encoder ckpt/pre_full_encoder.pth --edg_decoder ckpt/pre_full_edg_decoder.pth --cor_decoder ckpt/pre_full_cor_decoder.pth
- to convert layout pretrained only
If you have aligned pano image and corresponding extracted line segments, use visual.py, otherwise use visual_from_scratch.py.
See python visual.py -h for detailed arguments explaination. Basically, --path_prefix give the prefix path to 3 state_dict to load, --img_glob and --line_glob tell the input channels of rgb and line segment (remember to add quotes if you use wildcards like * in your glob path). Finally --output_dir specify the directory to dump the results.
Execute below command to get the same output as demos.
python visual.py --flip --rotate 0.25 0.5 0.75 --img_glob "data/test/img/pano_aaccxxpwmsdgvj.png" --line_glob "data/test/line/pano_aaccxxpwmsdgvj.png" --output_dir assert/
- output boudary probability map, suffix with
_edg.png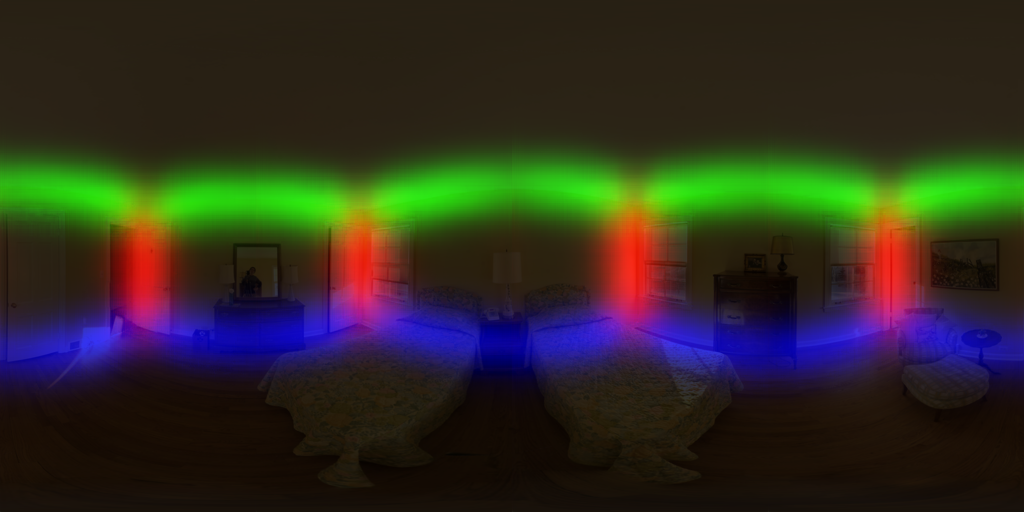
- output corner probability map, suffix with
_cor.png
- output boundary, suffix with
_bon.png(Note that below result isn't processed by 3D layout optimization)



If you have rgb pano image only, visual_from_scratch.py wraps pre-processing steps (line segments detector + alignment) such that you just have --line_glob specifying input rgb images.
See python train.py -h for detailed arguments explanation.
The default training strategy is the same as official. To launch experiments as official "corner+boundary" setting (--id is used to identified the experiment and can be named youself):
python train.py --id exp_default
To train only using RGB channels as input (no Manhattan line segment):
python train.py --id exp_rgb --input_cat img --input_channels 3
See python eval.py -h and python eval_corner_error.py -h for more detailed arguments explanation. Examples:
python eval.py --path_prefix ckpt/exp_default/epoch_30
python eval_corner_error.py --path_prefix ckpt/exp_default/epoch_30 --rotate 0.5 --flip
Note - post-processing component, 3D layout optimization, is not implemented. Alternatively, algorithm yieling initial corner guess are modified to get better result.
| exp | edg loss | cor loss | Corner error (%) |
|---|---|---|---|
| panofull_joint_box_pretrained | 0.128767 |
0.085045 |
1.35 |
| default setting | 0.116559 |
0.077435 |
0.98 |
| rgb only | 0.124780 |
0.085284 |
1.43 |
- Columns
edg loss- training objectivecor loss- training objectiveCorner error- L2 distance between ground truth and predicted corner positions normalized by image diagonal
- Rows
panofull_joint_box_pretrained- state_dict directly converted from officialdefault setting- all hyperparameters are not modifiedrgb only- model only trained with rgb, no line detection as extra features
- LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image
- Chuhang Zou, Alex Colburn, Qi Shan, Derek Hoiem
- CVPR2018
@inproceedings{zou2018layoutnet, title={LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image}, author={Zou, Chuhang and Colburn, Alex and Shan, Qi and Hoiem, Derek}, booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition}, pages={2051--2059}, year={2018} }