I am an MS Robotics student at Arizona state university. I do research in machine learning with focus on 3D vision and robotics. My masters thesis is in learning based Visual Odometry. My research is driven by a more abstract interest in shape understanding at both the structural and semantic levels.
- M.S., Robotics | Arizona State University
- B.Tech., Electronics and communication | SRM University
Researcher @ Active Perception Group (April 2023 - Present)
- Designing un-supervised learning based architechurre for monocular visual odometry on KITTI dataset.
Summer Intern @ HiMER Lab (October 2022 - July 2023)
- Implementation of robot teleoperation through Vertual Reality. This study also includes literature review of psychological factors involving human comfort, transparency, efficient communication and reconfigurability.

Crreating a 3D pointmap of a rocky mountain using ORB-SLAM. while autonomously navigating and landing on the mocing rover using optical flow (Concepts: ORB-SLAM, ROS, Gazebo Simulation, Optical flow) View Code
 See blog-post
I have written a detail article about Camera calinration and bundle Adjustment View Code
See blog-post
I have written a detail article about Camera calinration and bundle Adjustment View Code
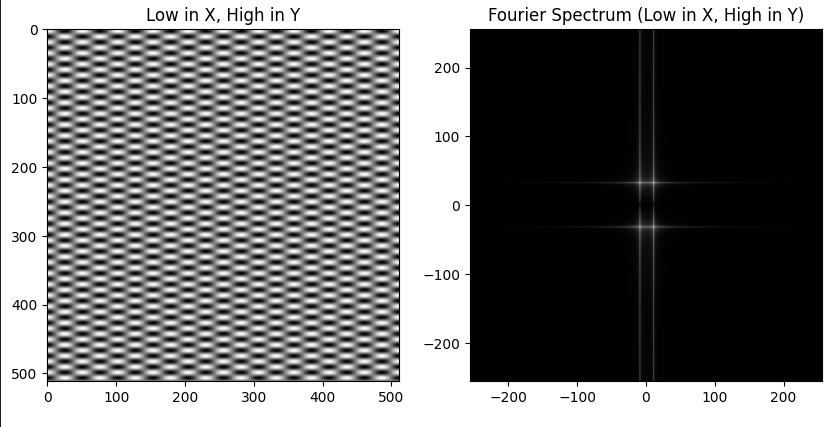
 Implementation of low-pass filter, high-pass filter on the images, Phase swapping of two images
See blog-post
Implementation of low-pass filter, high-pass filter on the images, Phase swapping of two images
See blog-post

Generation of Gaussian pyramid and Laplcian pyramid as a basic encoder decoder model
 Implemented a Deep Convolutional Generative Adversarial Network (DCGAN) model for image generation as described in Goodfellow’s paper, showcasing proficiency in deep learning and computer vision. (Implementation of Min-Max adversarial loss funtion)
View Code
Implemented a Deep Convolutional Generative Adversarial Network (DCGAN) model for image generation as described in Goodfellow’s paper, showcasing proficiency in deep learning and computer vision. (Implementation of Min-Max adversarial loss funtion)
View Code
 Balancing an inverted pendulum by programming an LQR controller. Design of a controller by checking observabilty matrix, kalman filtering, and finally checking the controllability of the designed system.
View Code
Balancing an inverted pendulum by programming an LQR controller. Design of a controller by checking observabilty matrix, kalman filtering, and finally checking the controllability of the designed system.
View Code
IROS 2018 https://ieeexplore.ieee.org/document/8594129 M. Harikrishnan Nair, T. Ghanshyam Singh, G. Chourasia, A. Das, A. Shrivastava and Z. S. Bhatt, "Flamen 7 DOF robotic Arm to Manipulate a Spanish Fan," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 4152-4157, DOI: 10.1109/IROS.2018.8594129.
https://ieeexplore.ieee.org/abstract/document/8991313 Chourasia, Gunjan, et al. "7-dof robotic manipulator for autonomous segregation using transfer learning." 2019 6th International Conference on Computing for Sustainable Global Development (INDIACom). IEEE, 2019.