A tutorial about running Cartographer toolkit with Delta III Lidar.
sudo apt install ros-melodic-cartographer
sudo apt install ros-melodic-cartographer-ros
sudo apt install ros-melodic-cartographer-ros-msgsThen you can find these three packages in /opt/ros/melodic/share . If not, type rospack find packagename in the terminal to find the path.
https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
Copy this link to download the demo bag(470MB)named cartographer_paper_deutsches_museum.bag. The default saving path is /home/username/Downloads
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bagYou could see the real-time laser scan data in rviz.


This implies you have installed cartographer successfully.
Weblink of Delta_III Lidar produced by 3irobotix:
http://www.3irobotics.com/pro_s.php?id=168
To install the driver and make the Lidar run,please reference delta_III_ros
Start the Lidar
roslaunch delta_lidar view_delta_lidar.launch
You could see the real-time laser scan data in rviz, then type rostopic list to acquire the topic name.

Here, Delta_III publishes a topic named /scan Print the information of /scan
rostopic echo /scan
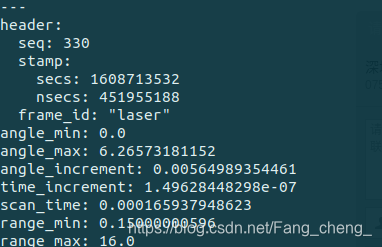
Find the frame_id: “laser”. This will be used later.
Find the file named revo_lds.lua in /opt/ros/melodic/share/cartographer_ros/launch , copy it and rename as my_revo_lds.lua
Constrained by the Insufficient Permissions, you could complete the tasks as follow:
Open a new terminal and cd /opt/ros/melodic/share/cartographer_ros/launch, then:
sudo cp revo_lds.lua my_revo_lds.luaModify the file:
sudo gedit my_revo_lds.luaOpen my_revo_lds.lua, implement the following modification:
//Change the original frame "horizontal_laser_link" into our "laser"
tracking_frame = "laser",
published_frame = "laser",Find the file named demo_revo_leds.launch in /opt/ros/melodic/share/cartographer_ros/configuration_files, copy it and rename as my_demo_revo_lds.launch
修改以下内容:
//Since it's not bag simulation, set the following value as false.
<param name="/use_sim_time" value="false" />
//Use our own configuration: change revo_lds.lua into my_revo_lds.lua
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_revo_lds.lua"
//Change horizontal_laser_2d into our topic scan
<remap from="scan" to="scan" />
//Delete the following codes.
<node name="playbag" pkg="rosbag" type="play"
args="--clock $(arg bag_filename)" />Firstly start the lidar and assure that there is effictive output laser data topic. Then
roslaunch cartographer_ros my_demo_revo_lds.launchStart to construct a occupancy grid map..
Open another terminal and type:
//End the first trajectory, and no further data will be added.
rosservice call /finish_trajectory 0
//Generate a pbstream file
rosservice call /write_state "{filename: '${HOME}/Downloads/mymap.pbstream'}"
//transform pbstream to pgm and yaml
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/kai/Downloads/mymap -pbstream_filename=/home/kai/Downloads/mymap.pbstream -resolution=0.05
The address and file name could be modified according to your preference.