- ORB-SLAM3forWindows-master这个尚未进行编译
- 编译主要参考了这两个项目的实践
- https://github.com/chanho-code/ORB-SLAM3forWindows
- 这是实际使用的项目: https://github.com/melhashash/orbslam3-windows
- 在windows11上使用 VS2019 配合Cmake-gui 编译
- 将Eigen下载源文件,并解压
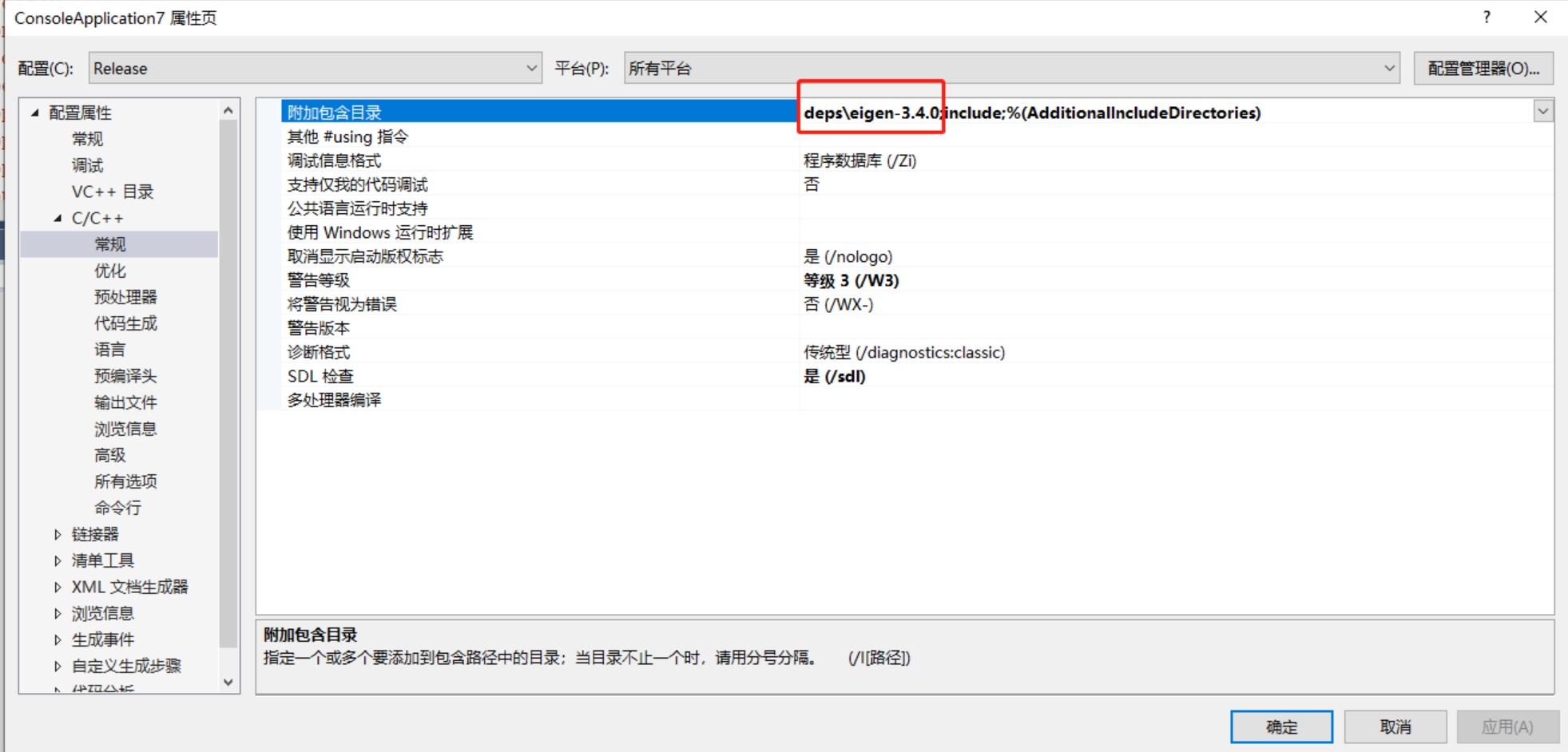
- 将Eigen库导入到VS中 在项目的附加包含目录中添加Eigen的解压路径(只要包含在最外层的文件路径就行)
- 这里准备了两个版本的Eigen 3.3.8 和 3.3.7(这个版本比较适用)

- 参考链接 https://blog.csdn.net/wangye_hope/article/details/125712401
- 下载boost_1_79_0.zip 下载链接:https://boostorg.jfrog.io/artifactory/main/release/1.79.0/source/boost_1_79_0.zip
- cd boost_1_79_0
- (应该用cmd运行?).\bootstrap.bat-->生成b2.exe
- 然后运行 b2.exe
b2.exe stage toolset=msvc-14.2 address-model=64 link=static runtime-link=static -j4 release- 可以看到在boost根目录的stage下面的lib中有生成的库,我们需要关注这个库: libboost_serialization-vc143-mt-s-x64-1_79.lib
- 首先需要下载 glew 2.1 选择.....\glew-2.1.0\build\vc12 的VS项目进行编译,编译glew_static和glew_shared,生成两个版本 一个是Debug 一个是Release 静态库在 lib(这个是Pangolin需要使用的) 动态库在bin 如果有报错的话需要吧glew32.dll文件放到C:\Windows\System32底下
- 用Cmake-Gui打开 Pangolin工程,建立build文件夹,点击Configure并选择Visual Studio 16 2019 x64.
- Generate 忽视这几个 Disable BUILD_EXTERN_GLEW, LIBJPEG, LIBPNG
- GLEW_LIBRARY 设置为glew 2.1 的include地址,以及设置编译好的glew32.lib
- 点开生成的vs工程,对pangolin工程 -> Properties -> C/C++ Tab -> Code Generation -> Runtime Library: Multi-threaded(/MT)(多线程设置)
- 忽视一个报错,工程会报错,但是最后可以生成一个./lib/Release/pangolin.lib
- 打开 cmake-gui,添加 'build' 文件夹在/Thirdparty/g2o
- 用Cmake-Gui打开 G2o 工程,建立build文件夹,点击Configure并选择Visual Studio 16 2019 x64.
- 点击Generate并打开VS工程.
- 设置编译模式Release.
- 修改 g2o project -> Properties -> General -> Target Extension: .lib, and Configure Type: Static Library (.lib)(生成静态库) 默认打开是动态库了,这里需要修改 在高级设置也要修改后缀名,不然会生成一个.dll
- g2o project -> Properties -> C/C++ Tab -> Code Generation -> Runtime Library: Multi-threaded(/MT) 原来是动态库的MD 也需要修改
- 预定义处理器增加一个g2o project -> Properties -> C/C++ Tab -> Preprocessor -> Preprocessor Definitions: add a 'WINDOWS'.
- Build ALL_BUILD. Finish(g2o.lib).
- 打开 cmake-gui,添加 'build' 文件夹在/Thirdparty/DBoW2
- 用Cmake-Gui打开 DBoW2 工程,建立build文件夹,点击Configure并选择Visual Studio 16 2019 x64.
- 点击Generate并打开VS工程, 这里如果出现opencv报错的话,需要指定所采用的opencv路径,同时需要把(opencv3.x报错的话也需要吧opencv v15下面的3个dll文件放到C:\Windows\System32)
- 设置编译模式Release.
- 修改 DBoW2 project -> Properties -> General -> Target Extension: .lib, and Configure Type: Static Library (.lib)(生成静态库) 默认打开是动态库了,这里需要修改 在高级设置也要修改后缀名,不然会生成一个.dll
- DBoW2 project -> Properties -> C/C++ Tab -> Code Generation -> Runtime Library: Multi-threaded(/MT) 原来是动态库的MD 也需要修改
- Build ALL_BUILD. Finish(DBoW2.lib).
- Open cmake-gui and make a 'build' directory in orbslam3-windows-master
- 用Cmake-Gui打开 orbslam3-windows-master 工程,建立build文件夹,点击Configure并选择Visual Studio 16 2019 x64.
- Click Generate and 注意oepncv和pangolin

- 设置编译模式Release.
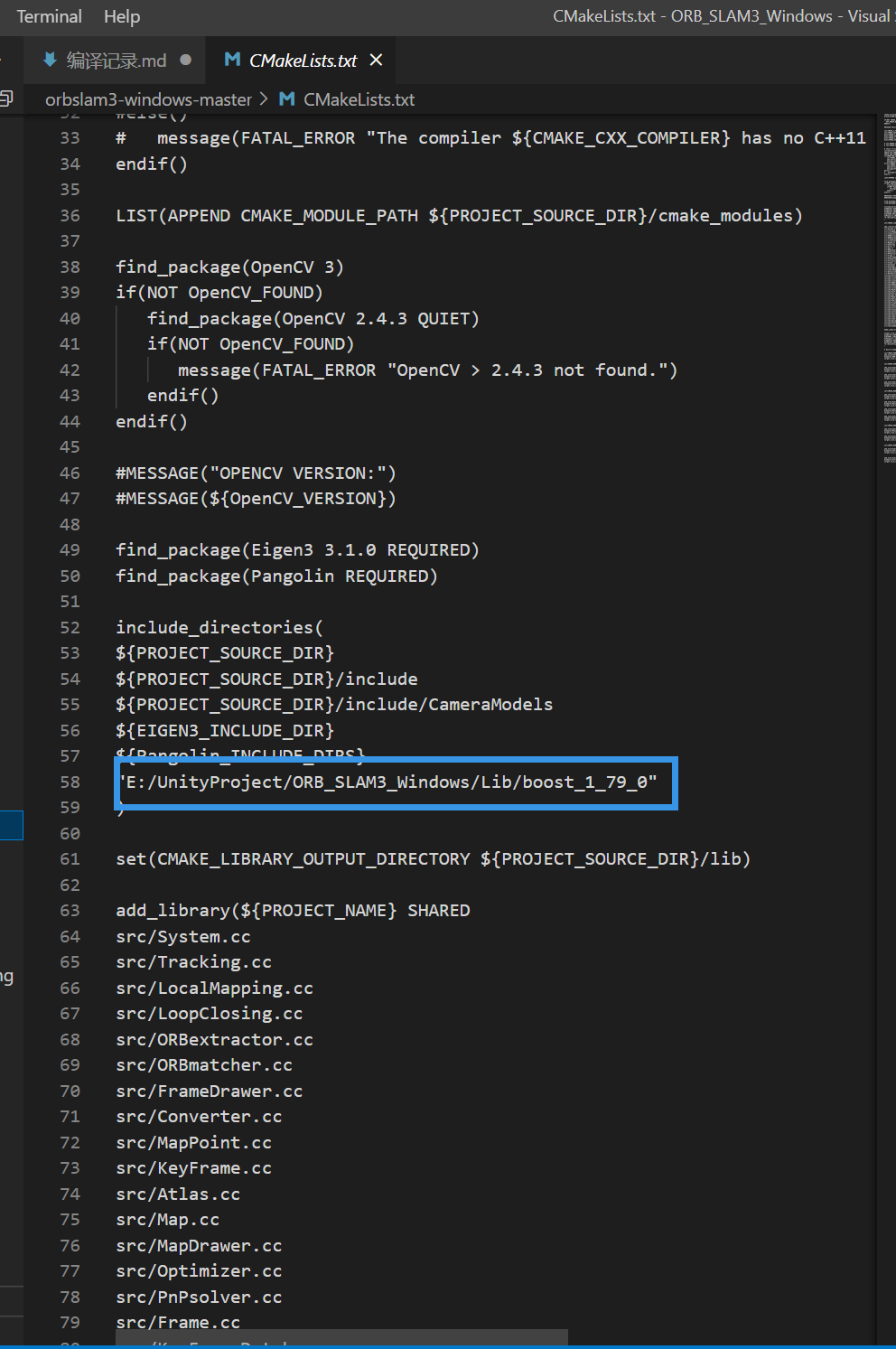
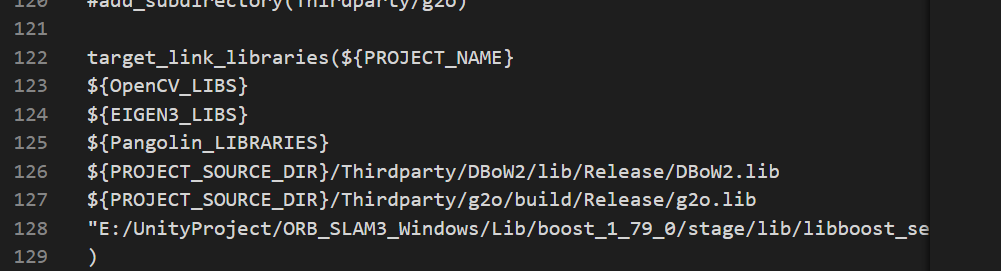
- 在主CmakeLists里修改boost的引用文件
- 修改 ORB-SLAM3 project -> Properties -> General -> Target Extension: .lib, and Configure Type: Static Library (.lib) (生成静态库) 默认打开是动态库了,这里需要修改 在高级设置也要修改后缀名,不然会生成一个.dll
- ORB-SLAM3 project project -> Properties -> C/C++ Tab -> Code Generation -> Runtime Library: Multi-threaded(/MT) 原来是动态库的MD 也需要修改
- ORB-SLAM3 project -> Properties -> C/C++ Tab -> Preprocessor -> Preprocessor Definitions: 增加一个宏 'COMPILEDWITHC11'.
- 只构建 ORB-SLAM3 (不是全部构建 ALL_BUILD). Finish(ORB_SLAM3.lib)



- 基本流程与上述是相似的,需要下载相关数据集,然后可以参考两个工程的READAME.md
.\stereo_inertial_euroc.exe .\Vocabulary\ORBvoc.txt ..\EuRoC.yaml ..\MH02 ..\EuRoC_TimeStamps\MH02.txt dataset-MH02_stereoi注: 文件夹的顺序与文件名的顺序需要注意