

![]()
Website: http://www.pyslvs.com/blog/index.html
A GUI-based tool solving 2D linkage subject.
-
Planar Linkages Simulation: Kernel from Solvespace with Python bundle (SWIG).
-
Dimensional Synthesis: Kernel from three Cython algorithm API (rewrite).
Compatible with Python 3.5, PyQt 5.7 (for PyQtChart) and above.
Cross-platform Development: Ubuntu and Windows (64-bit).
You should install Graphviz first. See here.
Please note that the other platforms may be available but I have not tested before.
Previews in KDE Plasma desktop:

Previews in Windows 8.1 theme:

Open GUI by Python:
python3 launch_pyslvs.pyOr see the help:
python3 launch_pyslvs.py --helpReferring symbolic from PMKS.
-
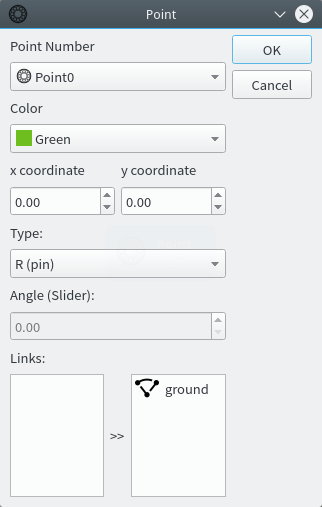
Point
-
Link
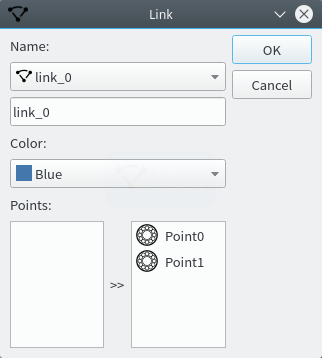


The PMKS expression is using a name label to present a link bar.
A joint between two links will get two name labels, and so on.
The "ground" label is a default name, this link will be the absolute coordinate in the system, might be a frame of your mechanism.

Pyslvs was translate the PMKS expression as a string, like below:
M[J[R, color[Green], P[0.0, 0.0], L[ground, link_0]], J[R, color[Green], P[12.92, 32.53], L[link_0, link_1]], J[R, color[Green], P[73.28, 67.97], L[link_1, link_2]], J[R, color[Green], P[33.3, 66.95], L[link_1]], J[R, color[Green], P[90.0, 0.0], L[ground, link_2]]]
Then the expression can be parse in Pyslvs to create the mechanism.
Analysis a type of mechanism that exists, and find out other possibilities.

We have a topological algorithm to combine atlas with:
- Same degree of freedom.
- Same number of link.
- Same number of joint.
And use a type of mechanism to do grounding combine.

Grounding combine can merge the structure diagram immediately to canvas.
But in the common ways, you can give it to dimensional synthesis to make it more useful.
Before doing dimensional synthesis, a structure diagram has to configure it's verification formula.

PLAP function is using two known points, a length variable and an angle variable to find out the position of third point.
PLLP function is using two known points and two length variables to find out the position of third point.
When the structure profile is complete, is time to doing dimensional synthesis!
Generate a mechanism with path requirement by random variables.

Contains three algorithms:
- Real Genetic Algorithm
- Firefly Algorithm
- Differential Evolution
Specify a path and options to generate a crank rocker.
This function has a simple TCP ZMQ connecting mode.
You should install some python module and SDK first.
The Makefile is included at compile steps, so some environment setting also should be set.
Ubuntu:
$ sudo pip3 install -r requirements.txtWindows:
Python 3: Official Python for Windows 64 bit.
Makefile tool: MinGW or Msys 2.
> pip install -r requirements.txtGraphviz tools provide some graph engine that can make the position of dots in atlas looks more pretty.
Download it from here or:
$ sudo apt install graphvizWindows user please make sure to add Graphviz bin folder path to environment variables.
Then use the dot command to check if it works.
If you are not willing to install Graphviz, you can just using built-in layout from NetworkX.
PyQt5 and QtChart are now pack into the wheel file that Windows and Ubuntu can use them.
When the installation is complete by pip, some stuff need to remind you.
Qt tools can use to design the user interface, they are not the requirement if you just want to run Pyslvs.
Ubuntu:
Download Qt5 and install it, then we will get the tools.
If your desktop is made by earlier Qt version, you should install in another place.
Download and install / upgrade SIP.
>>> import sip
>>> print(sip, sip.SIP_VERSION_STR)Then remove SIP from the location:
$ sudo rm -fr /usr/local/libs/python3.5/dist-packages/sip*Or maybe directly:
$ sudo pip3 install sip -UWindows:
Windows user can get Qt tools by pip, and don't need to install Qt package.
> pip install pyqt5-toolsMake command:
make build-kernelThis project including 2 kernels should build, please following the steps if you are first time to use.
Make command:
make -C core/libs/python_solvespaceUbuntu:
First, install SWIG. This tool kit can make a Python bundle with C/C++ library.
If your not, install python development kit.
sudo apt install swig python3-devWindows:
Download and install SWIG.
If your Python doesn't have development library, like libpython35.a, using gendef to generate it.
In Python 3.6 and above versions, you do not have to get lib file.
First copy python3x.dll to where_your_python\libs folder.
Then using this command:
gendef python3x.dll
dlltool --dllname python3x.dll --def python3x.def --output-lib libpython3x.aYou need to modify a few of Python files to avoid these conflicts before compile the library. But you can be assured that the changes won't cause any negative impact.
Find this code in where_your_python\Lib\distutils\cygwinccompiler.py:
# no additional libraries needed
self.dll_libraries=[]
# Include the appropriate MSVC runtime library if Python was built
# with MSVC 7.0 or later.
self.dll_libraries = get_msvcr()Commit self.dll_libraries = get_msvcr().
And then adjust source code about Virtual Studio. Find this code in where_your_python\include\pyconfig.h.
#ifdef _WIN64
#define MS_WIN64
#endifCut them and paste Above this:
#ifdef _MSC_VERYou also will get warning with _hypot in pyconfig.h, and you should do this step.
In where_your_python\include\pyconfig.h, find this:
#define COMPILER "[gcc]"
#define hypot _hypotEdit it to this:
#define COMPILER "[gcc]"
#ifndef _MATH_H_
#define hypot _hypot
#endifType and Dimensional synthesis libraries.
Make command:
make build-cythonUbuntu:
Ubuntu user can compile the kernel by Cython directly.
Windows:
There's two options to choose SDK:
- Using Microsoft Visual Studio. You can get it from here, then startup the Visual Studio Community and install Windows SDK.
- Using Msys 2. It is based on MinGW 64-bit version.
After the actual test, Microsoft Visual Studio SDK will take a large of file size in your disk, but the executable file will smaller than Msys.
One benefit of Msys is that it is portable.
As your wish, it can be renamed or moved out and operate independently in no-Python environment.
Ubuntu:
Use shell command to build as AppImage.
After following operation, the executable file is in out folder.
Make command:
$ sudo pip3 install virtualenv
$ makeWindows:
Use PyInstaller to build.
After following operation, the executable file is in dist folder.
Make command:
> pip install pyinstaller
> makeMade by Qt5 and Python IDE Eric 6.
Including Python modules:
- SIP (GPLv2, GPLv3)
- PyQt5, PyQtChart (GPLv3)
- dxfwrite (MIT)
- numpy (BSD 3-Clause)
- Cython (Apache 2.0)
- PyZMQ (New BSD 3-Clause, LGPL, Apache)
- openpyxl (MIT)
- psutil (BSD)
- peewee (MIT)
- Lark-parser (MIT)
- NetworkX (BSD 3-Clause)
- Pydot (MIT)
Pyslvs is under GNU Affero General Public License v3.
Here is the origin kernel repository: