supplemental_video.mp4
Event cameras are ideally suited to capture High Dynamic Range (HDR) visual information without blur but provide poor imaging capability for static or slowly varying scenes. Conversely, conventional image sensors measure absolute intensity of slowly changing scenes effectively but do poorly on HDR or quickly changing scenes. In this paper, we present an asynchronous linear filter architecture, fusing event and frame camera data, for HDR video reconstruction and spatial convolution that exploits the advantages of both sensor modalities. The key idea is the introduction of a state that directly encodes the integrated or convolved image information and that is updated asynchronously as each event or each frame arrives from the camera. The state can be read-off as-often-as and whenever required to feed into subsequent vision modules for real-time robotic systems. Our experimental results are evaluated on both publicly available datasets with challenging lighting conditions and fast motions, along with a new dataset with HDR reference that we provide. The proposed AKF pipeline outperforms other state-of-the-art methods in both absolute intensity error (69.4% reduction) and image similarity indexes (average 35.5% improvement). We also demonstrate the integration of image convolution with linear spatial kernels Gaussian, Sobel, and Laplacian as an application of our architecture.
Ziwei Wang, Yonhon Ng, Cedric Scheerlinck and Robert Mahony
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2023
If you use or discuss our asynchronous linear filter architecture or the Asynchronous Kalman Filter (AKF), please cite our paper as follows:
@article{wang2023asynchronous,
title={An Asynchronous Linear Filter Architecture for Hybrid Event-Frame Cameras},
author={Wang, Ziwei and Ng, Yonhon and Scheerlinck, Cedric and Mahony, Robert},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2023},
publisher={IEEE}
}
@inproceedings{wang2021asynchronous,
title={An asynchronous kalman filter for hybrid event cameras},
author={Wang, Ziwei and Ng, Yonhon and Scheerlinck, Cedric and Mahony, Robert},
booktitle={Proceedings of the IEEE/CVF International Conference on Computer Vision},
pages={448--457},
year={2021}
}
cd ./code/
run_filter
Before running run_filter.m, update the parameters if necessary.
There are a few parameters that users can specify:
In file run_filter.m:
| Variables | Description | Default Value |
|---|---|---|
DataName |
choose a dataset to load | city_09d_150_200 |
cf_akf_method |
1: run asynchronous Kalman filter (AKF), 0: run complementary filter (CF) | 1 |
cutoff_frequency_cf |
default cutoff_frequency for complementary filter (CF) | 15 |
deblur_option |
1: deblur, 0: no deblur. Use the deblur option if the input images are blurry | 1 |
framerate |
the frame rate of the output image sequence in Hz | 300 |
use_median_filter |
a flag of applying a 3-by-3 median filter to the output images | 0 |
output_high_frame_rate_flag |
1: output images of the pre-defined framerate, 0: output images of the frame intensity framerat. | 1 |
sigma_p |
the process noise parameter | 0.0005 |
sigma_i |
the isolated noise parameter | 0.03 |
sigma_r |
the refractory noise parameter | 0.05 |
refractory_period |
the refractory period in microsecond. It models the circuit limitations in each pixel of an event camera limit the response time of events | 10000 |
min_ct_scale |
the minimal value for the contrast threshold scaling factor | 0.6 |
max_ct_scale |
the maximal value for the contrast threshold scaling factor | 100 |
p_ini |
initial value for state covariance P | 0.09 |
In file event_asynchronous_filter.m:
post_process: 0 for no normalization; 1 for (image-min/(max-min)); 2 for user-defined maximum and minimum value for extremely bright view; 3 for user-defined maximum and minimum value for extremely dark view. Post-processing methods are important in displaying the reconstructed HDR images since the intensity values can go beyond 0 and 1; 4 for contrast-limited adaptive histogram equalization (using matlab inbuilt functionadapthisteq()). HDR data with grountruth(output_gt_HDR == 1), will usetonemap_hdr.m. Without a proper post-processing method, the details in the HDR part of the image (higher than 1 or lower than 0) can not be displayed. Users can adjust the pre-defined maximum and minimum value in file output_img.m to have the best visualization.post_processis only for visualization, the HDR quantitative analysis (MSE) should use raw reconstruction.- The
f_Qis the most important parameter for image noise. It represents the inverse of theR_barfunction inequation (6)in the paper. You can simply treat it as the image confidence function of intensity. For example, for an image in the range [0 255], the extreme values around 0 and 255 would have lower confidence. Thef_Qis included in the provided dataset. If you are using your own dataset, you need to tune it carefully. - The preset exposure time for each intensity image is included in the provided datasets (some datasets are recorded with auto-exposure, e.g., interlaken_01a_events_1_150.mat). If you want to use your own dataset, please set or estimate the exposure time as well.
- If the exposure time for the intensity images are very short and there is almost no blurry, you can disable the deblur function by setting
deblur_option = 0. But you still need to define anexposuretime.
Download the datasets and save them in folder data/.
If you want to use your datasets, define post_process method, f_Q, exposure, contrast threshold ct at the beginning of event_asynchronous_filter.m. See notes in the next section.
Dataset name convention: DatasetName_StartFrame_EndFrame of the original dataset (we only keep the fast motion part or highly HDR part in the sample datasets. You can download the whole dataset sequence from the website of the following papers, and test if you like). The example datasets are publicly available datasets from: [Mueggler et al., IJRR 2017], [Scherlinck et al., ACCV 2018], [Gehrig et al., ICRA 2021].
Our HDR Hybrid Event-Frame Dataset provides HDR groundtruth for quantitative HDR evaluation.
Selected Images from Our HDR Hybrid Event-Frame Dataset:
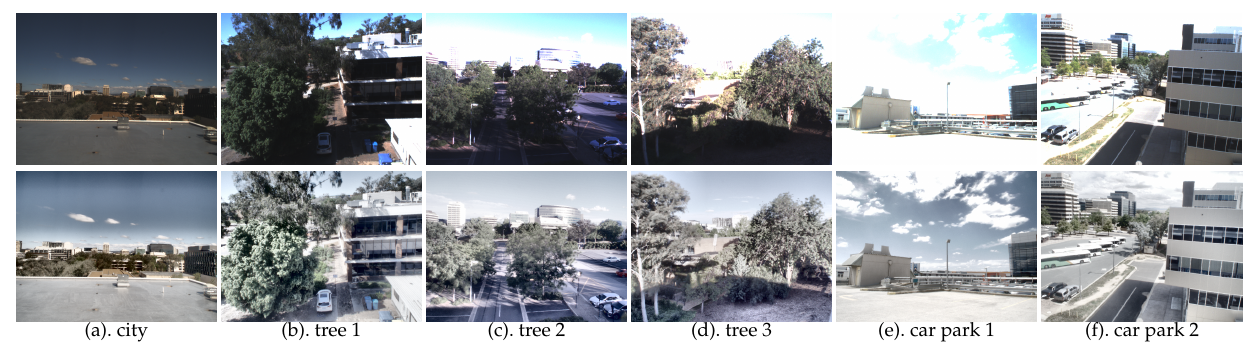
Raw data includes raw events, HDR ground truth images, LDR images, exposure time, etc. This can be directly used for AKF.
For some methods that require event reconstruction and frame pairs, we provide reconstructed event data using the E2VID event reconstruction algorithm [Rebecq et al., TPAMI 2019].
After producing reconstruction results using our HDR dataset, run ./code/eval/anal_hdr_results.m to evaluate the HDR reconstruction performance:
cd ./code/eval/
eval_data = '{folder_name}'; anal_hdr_results(eval_data);
Replace {folder_name} with the reconstruction folder you generated, such as carpark2_akf.
The evaluation code anal_hdr_results.m loads groundtruth and reconstruction data from ./reconstruction/{folder_name}, evaluates on SSIM, MSE, PSNR and HDRVDP metrics and then saves the average evaluation results to ./reconstruction/{folder_name}/results.txt and saves the detailed evaluation results to ./reconstruction/{folder_name}/results_all.mat.
- Make sure your event and image timestamps are well aligned.
- As a nature of the filtering methods, the quality of the reconstruction results is relevant to the quality of event camera datasets. Datasets with obvious noise recorded by hybrid event-frame cameras or lower resolution/sensitivity cameras such as DAVIS 240 might lead to unsatisfied results in high temporal resolution video reconstruction. The method requires a short time to adapt and converge to the optimal Kalman filter parameters for each dataset.
- For academic use only. Should you have any questions or suggestions regarding this code and the corresponding results, please don't hesitate to get in touch with ziwei.wang1@anu.edu.au