Laser Reflectance Feature Assisted Accurate Extrinsic Calibration for Non-repetitive LiDAR and Camera Systems
In this repository, we aim to build a automatic calibration tool for Livox-LiDAR-Camera system.
Since the paper related to this work are under peer-review, only the calibration results and part of the code are shown here this repository. The core optimization code has not yet been released, and will be fully open sourced in the near future.
If you have any questions or suggestions, or want to obtain the data supporting our paper, you can contact me by email: bit20lzc@163.com
- PCL (>1.7)
- Eigen3(3.3.4)
- OpenCV (>3.0)
- ceres
-
grid fitting process:
-
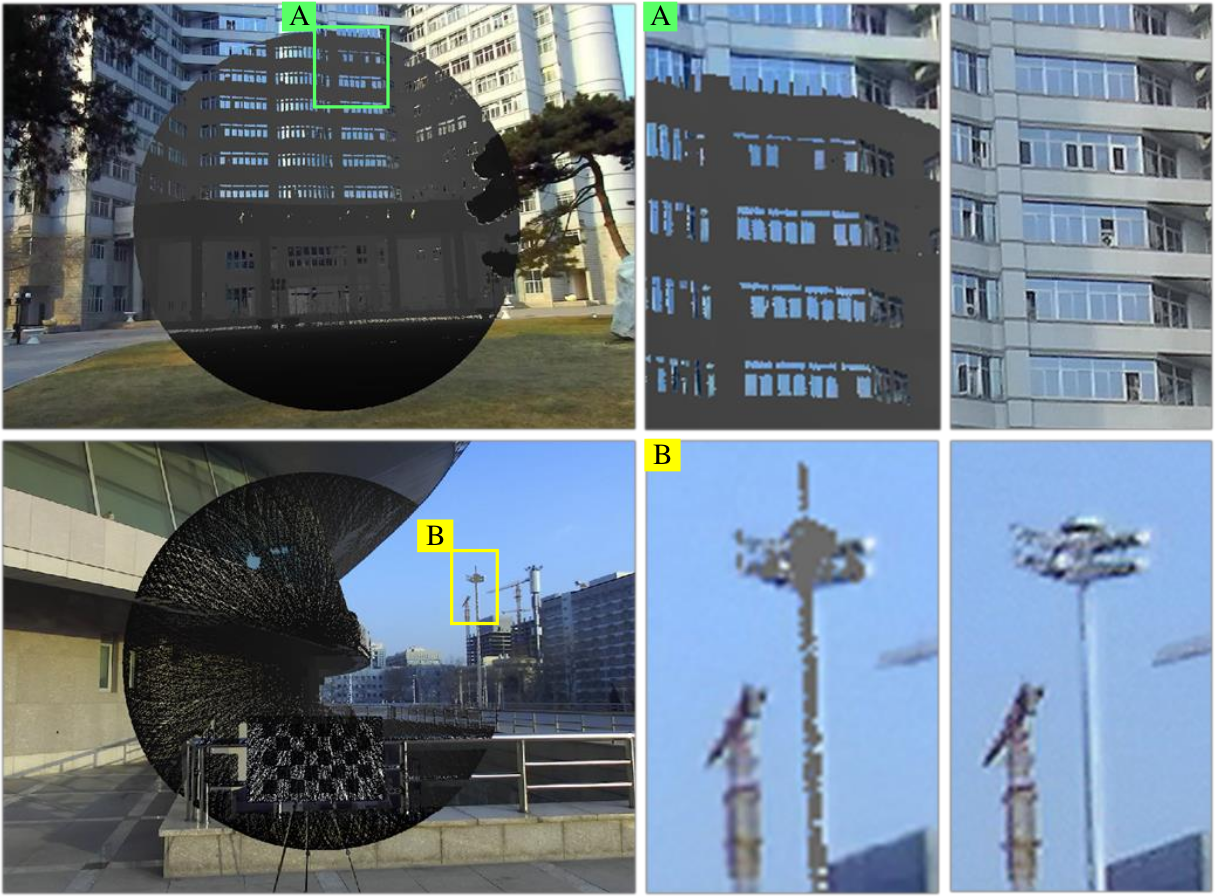
Reproject results: point cloud to image:
-
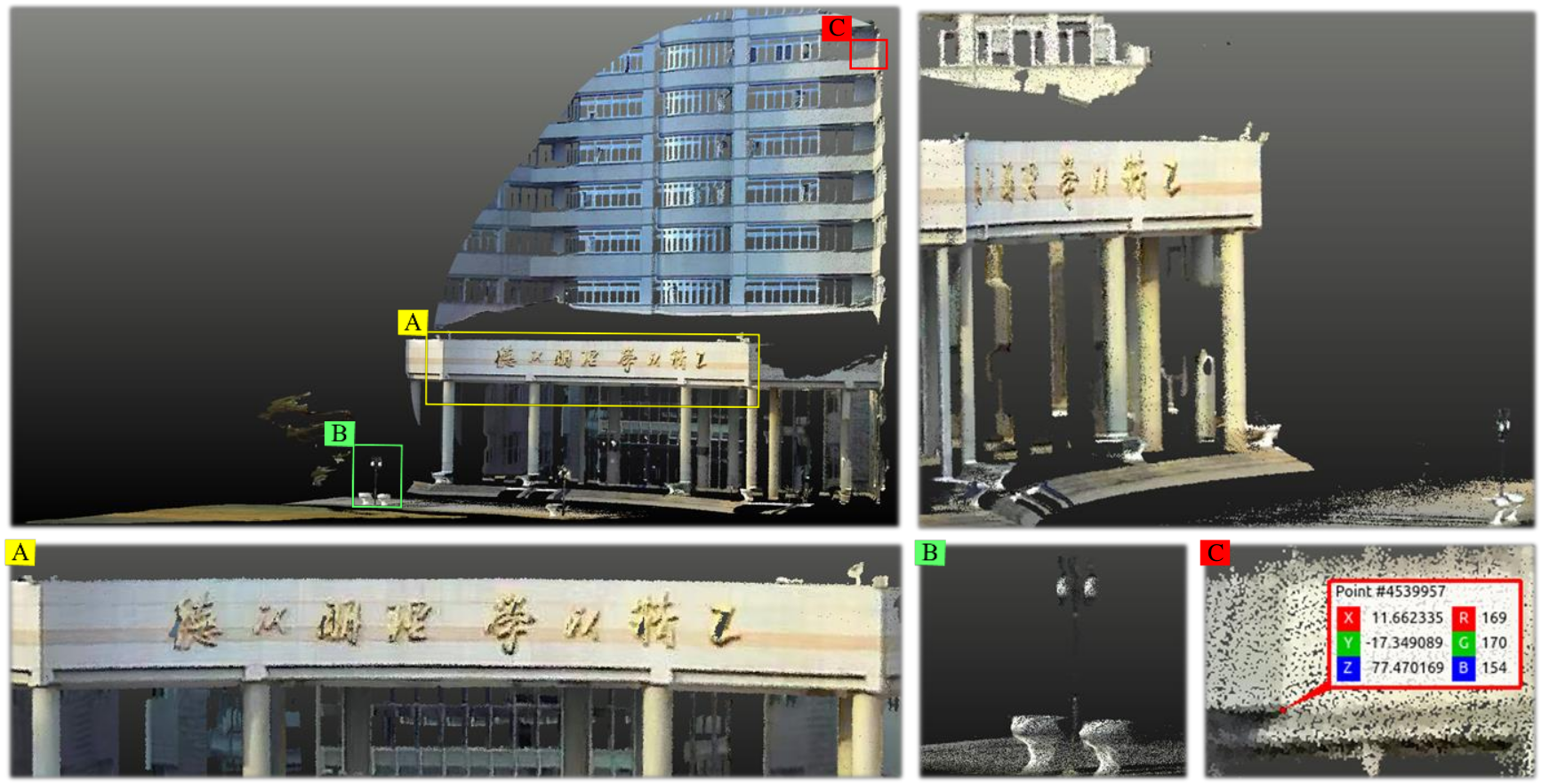
Reproject results: image pixel map to point clouds:



The complete code of simulation tool has been uploaded to Livox_Cam_Simulator. Some result as shown in the following figures.
-
The scan model of Livox LiDAR:
-
The zed camera combined with Livox LiDAR:
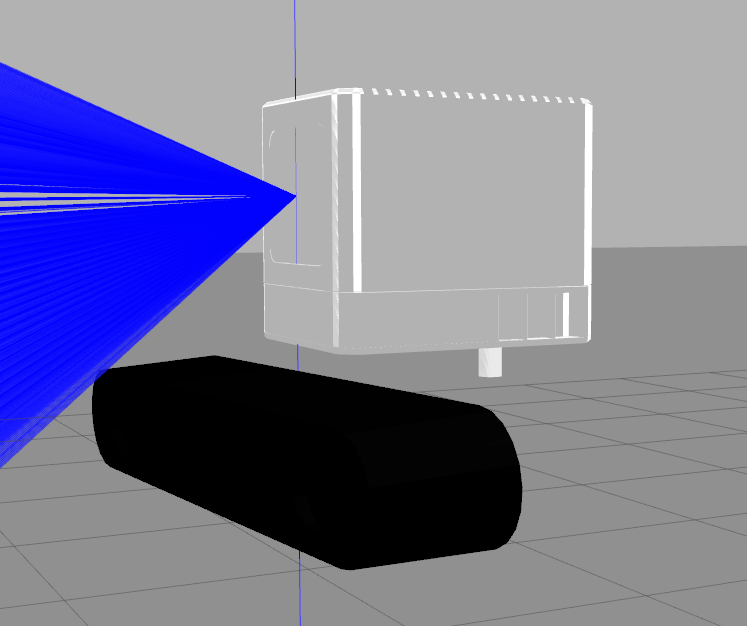
-
The Gazebo scene:
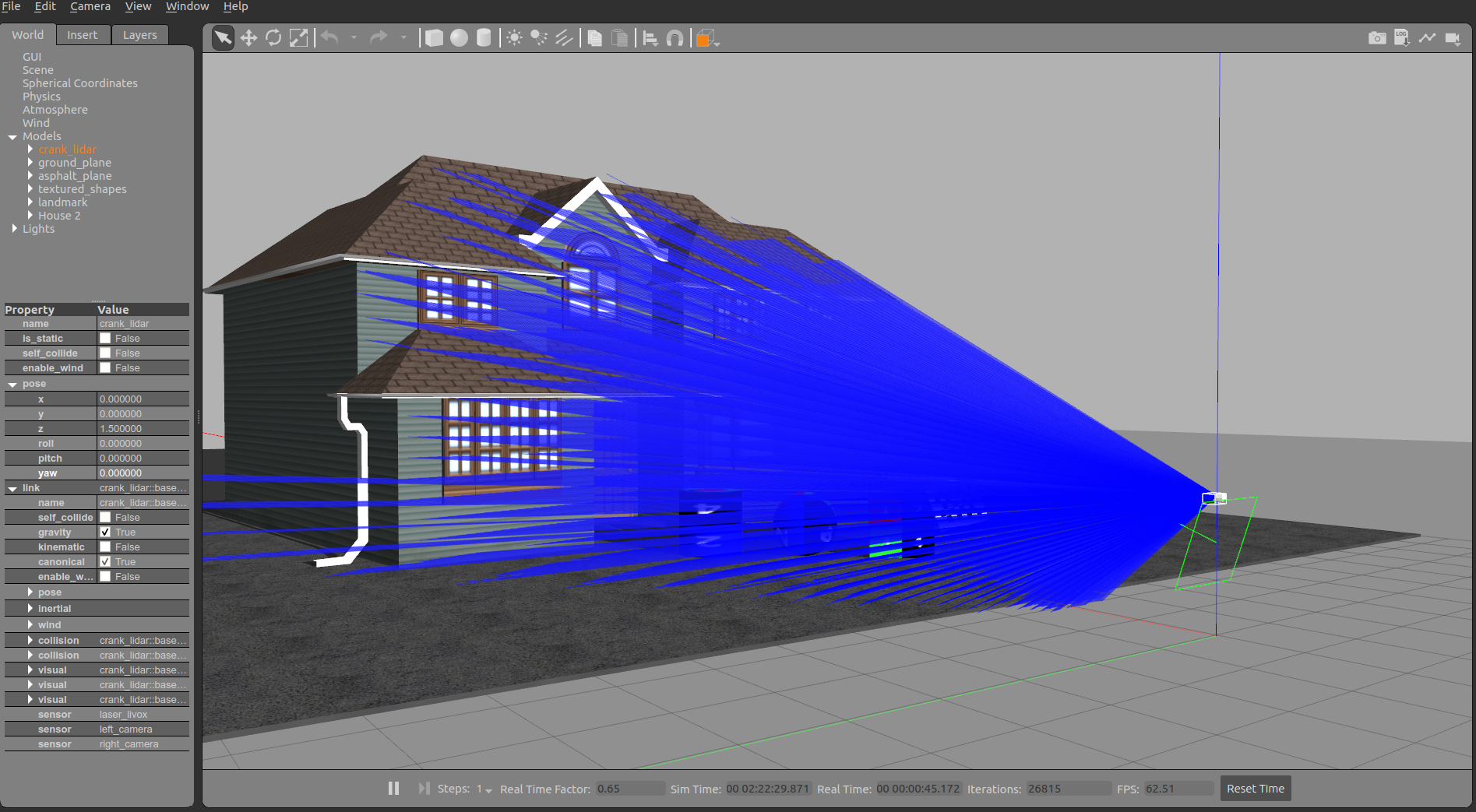
-
The rviz visulation :
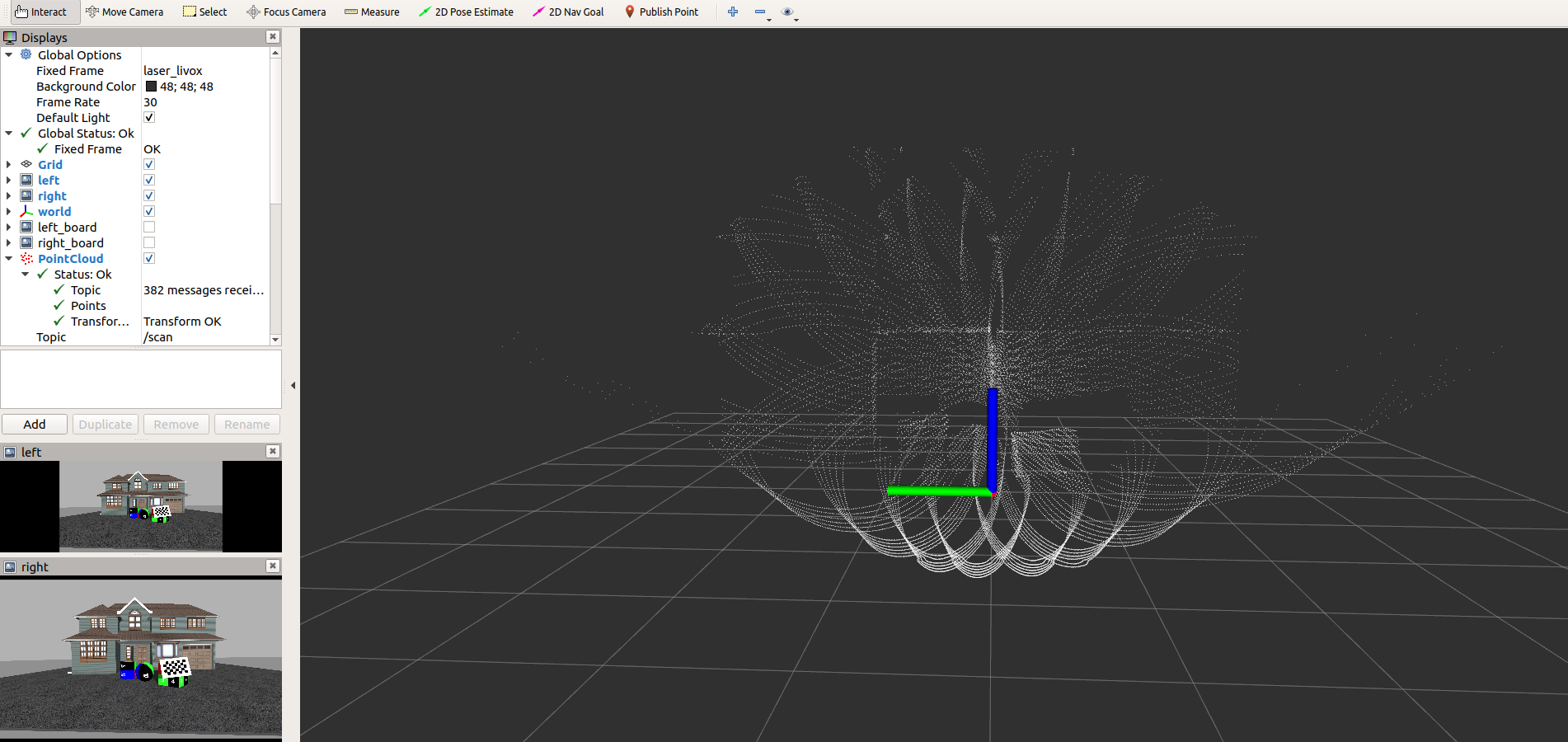




Point clouds with reflectance intensity which mapped according to the color of the materials:

-
laser_min_range: 0.1 // min detection range
-
laser_max_range: 200.0 // max detection range
-
horizontal_fov: 70.4 //°
-
vertical_fov: 77.2 //°
-
ros_topic: scan // topic in ros
-
samples: 24000 // number of points in each scan loop
-
downsample: 1 // we can increment this para to decrease the consumption
-
publish_pointcloud_type: 0 // 0 for sensor_msgs::PointCloud, 1 for sensor_msgs::Pointcloud2(PointXYZ), 2 for sensor_msgs::PointCloud2(LivoxPointXyzrtl) 3 for livox_ros_driver::CustomMsg.
-
LiDAR-Camera pose: (set LiDAR coordinate system as the world system)
<arg name="zed2_x" default="0.04"/> <arg name="zed2_y" default="0.08"/> <arg name="zed2_z" default="-0.061"/> <arg name="zed2_roll" default="0.015"/> <arg name="zed2_pitch" default="0.032"/> <arg name="zed2_yaw" default="0.061"/>