This repo contains a sliding-window optimization-based odometry system fusing visual, inertial and global position measurements. It builds on top of the visual-inertial odometry algorithm SVO Pro.
If you use this code in an academic context, please cite the following IROS 2020 paper.
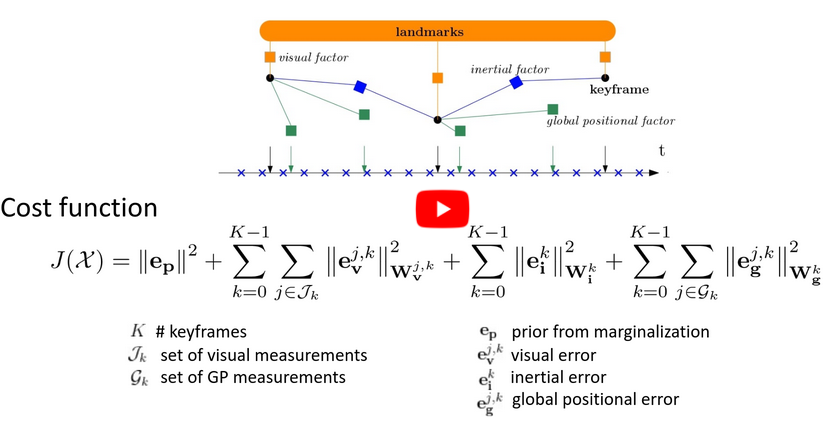
G. Cioffi and D. Scaramuzza, "Tightly-coupled Fusion of Global Positional Measurements in Optimization-based Visual-Inertial Odometry," IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2020.
@InProceedings{cioffi2020tightly,
author={Cioffi, Giovanni and Scaramuzza, Davide},
title={Tightly-coupled fusion of global positional measurements in optimization-based visual-inertial odometry},
booktitle={2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={5089--5095},
organization={IEEE},
year = {2020}
}
The code has been tested on
- Ubuntu 18.04 with ROS Melodic
- Ubuntu 20.04 with ROS Noetic
Install catkin tools and vcstools if you haven't done so before. Depending on your operating system, run
# For Ubuntu 18.04 + Melodic
sudo apt-get install python-catkin-tools python-vcstoolor
# For Ubuntu 20.04 + Noetic
sudo apt-get install python3-catkin-tools python3-vcstool python3-osrf-pycommonInstall system dependencies and dependencies for Ceres Solver
# system dep.
sudo apt-get install libglew-dev libopencv-dev libyaml-cpp-dev
# Ceres dep.
sudo apt-get install libblas-dev liblapack-dev libsuitesparse-devCreate a workspace and clone the code (ROS-DISTRO=melodic/noetic):
mkdir svo_gps_ws && cd svo_gps_ws
catkin config --init --mkdirs --extend /opt/ros/<ROS-DISTRO> --cmake-args -DCMAKE_BUILD_TYPE=Release
cd src
git clone git@github.com:uzh-rpg/rpg_svo_pro_gps.git
vcs-import < ./rpg_svo_pro_gps/dependencies.yaml
touch minkindr/minkindr_python/CATKIN_IGNORE
catkin buildRefer to SVO Pro.
We provide here and example on how to run the code on the MH_01 sequence of the EuRoC dataset.
Download from here a rosbag containing data of the MH_01 sequence including simulated global position measurements. This is the script used to create such a rosbag. This is the script used to convert the ground truth from the EuRoC format to our format. The global position measurements are obtained from adding Gaussian noise (mean = 0.0, std = 0.20) to the ground truth.
# Terminal 1: launch the pipeline
roslaunch svo_ros euroc_vio_gp_mono.launch
# Terminal 2: run the rosbag
rosbag play MH_01_easy_with_gp.bag
# (Optional) Terminal 3: Record estimates in a rosbag
cd svo_gps_ws/src/rpg_svo_pro_gps/scripts/bash
./record_vio.sh desired-path# Terminal 1: launch the pipeline
roslaunch svo_ros euroc_vio_gp_stereo.launch
# Terminal 2: run the rosbag
rosbag play MH_01_easy_with_gp.bag
# (Optional) Terminal 3: Record estimates in a rosbag
cd svo_gps_ws/src/rpg_svo_pro_gps/scripts/bash
./record_vio.sh desired-pathThe VIO system used in this repo is based on SVO Pro. Check SVO Pro for the full list of aknowledgments.
The code is licensed under GPLv3. For commercial use, please contact the authors at cioffi@ifi.uzh.ch and sdavide@ifi.uzh.ch.
Check SVO Pro for licenses of the external dependencies.