这是一个基于hdl_localization的action客户端,它与作为服务端的FAST_LIO2_server一起构建了一个完整的ROS action通信结构。本仓库协同FAST_LIO2_server的目的是解决hdl_localization在应对先验地图发生变化时定位不准的问题,以及完善地图更新,实现巡检任务的长期稳定性。
解决思路是检测全局定位不准时,触发临时建图模块FAST-LIO2来维持定位,同时利用action的反馈机制将每帧的里程计以及点云发送给hdl_localization进行发布以及状态更新,维持定位任务的稳定性。
当检测到hdl_localization的定位稳定准确时,将退出临时建图模块(TMM),并将此阶段FAST-LIO2的结果按序号记录在生成的文件夹中。当数据播放完毕时,启动MergeMap.launch可在线/离线完成全局的地图更新。地图更新策略是光路占据检测去除全局地图变化的点云,以及直接添加当前扫描帧增加的点云;构建因子图模型,定义里程计因子为二元边,定义全局位姿为一元边,优化临时建图过程里程计的漂移误差,平滑临时建的图与全局地图的衔接。
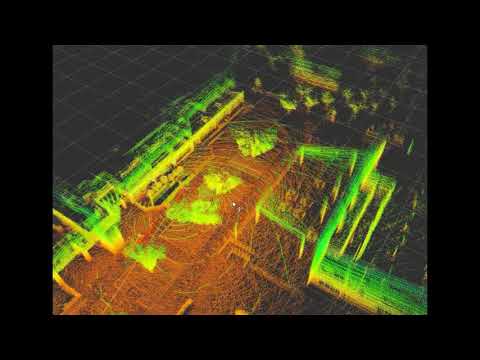
图1是使用绝影X30对云深处科技办公楼的负1楼至2楼的扫描点云图。 图2是在图1的基础上,对1楼的更新扫描。绿色点云是新增点云。 图3是在图2的基础上,对园区的更新扫描。红色点云是新增点云。



hdl_localization is a ROS package for real-time 3D localization using a 3D LIDAR, such as velodyne HDL32e and VLP16. This package performs Unscented Kalman Filter-based pose estimation. It first estimates the sensor pose from IMU data implemented on the LIDAR, and then performs multi-threaded NDT scan matching between a globalmap point cloud and input point clouds to correct the estimated pose. IMU-based pose prediction is optional. If you disable it, the system uses the constant velocity model without IMU information.
Video:

hdl_localization requires the following libraries:
- PCL
- OpenMP
The following ros packages are required:
- pcl_ros
- ndt_omp
- fast_gicp
- hdl_global_localization
cd /your/catkin_ws/src
git clone https://github.com/koide3/ndt_omp
git clone https://github.com/SMRT-AIST/fast_gicp --recursive
git clone https://github.com/koide3/hdl_localization
git clone https://github.com/koide3/hdl_global_localization
cd /your/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE=Release
# if you want to enable CUDA-accelerated NDT
# catkin_make -DCMAKE_BUILD_TYPE=Release -DBUILD_VGICP_CUDA=ONUsing docker, you can conveniently satisfy the requirement environment.
Please refer to the repository below and use the docker easily.
All configurable parameters are listed in launch/hdl_localization.launch as ros params. The estimated pose can be reset using using "2D Pose Estimate" on rviz
- /odom (nav_msgs/Odometry)
- Estimated sensor pose in the map frame
- /aligned_points
- Input point cloud aligned with the map
- /status (hdl_localization/ScanMatchingStatus)
- Scan matching result information (e.g., convergence, matching error, and inlier fraction)
- /relocalize (std_srvs/Empty)
- Reset the sensor pose with the global localization result
- For details of the global localization method, see hdl_global_localization
Example bag file (recorded in an outdoor environment): hdl_400.bag.tar.gz (933MB)
rosparam set use_sim_time true
roslaunch hdl_localization hdl_localization.launchroscd hdl_localization/rviz
rviz -d hdl_localization.rvizrosbag play --clock hdl_400.bag# perform global localization
rosservice call /relocalize

If it doesn't work well or the CPU usage is too high, change ndt_neighbor_search_method in hdl_localization.launch to "DIRECT1". It makes the scan matching significantly fast, but a bit unstable.

Kenji Koide, Jun Miura, and Emanuele Menegatti, A Portable 3D LIDAR-based System for Long-term and Wide-area People Behavior Measurement, Advanced Robotic Systems, 2019 [link].
Kenji Koide, k.koide@aist.go.jp
Active Intelligent Systems Laboratory, Toyohashi University of Technology, Japan [URL] Human-Centered Mobility Research Center, National Institute of Advanced Industrial Science and Technology, Japan [URL]