![]()
3D printed robot arm powered by ROS and Arduino Uno
Explore the docs »
View Demo
·
Report Bug
·
Request Feature
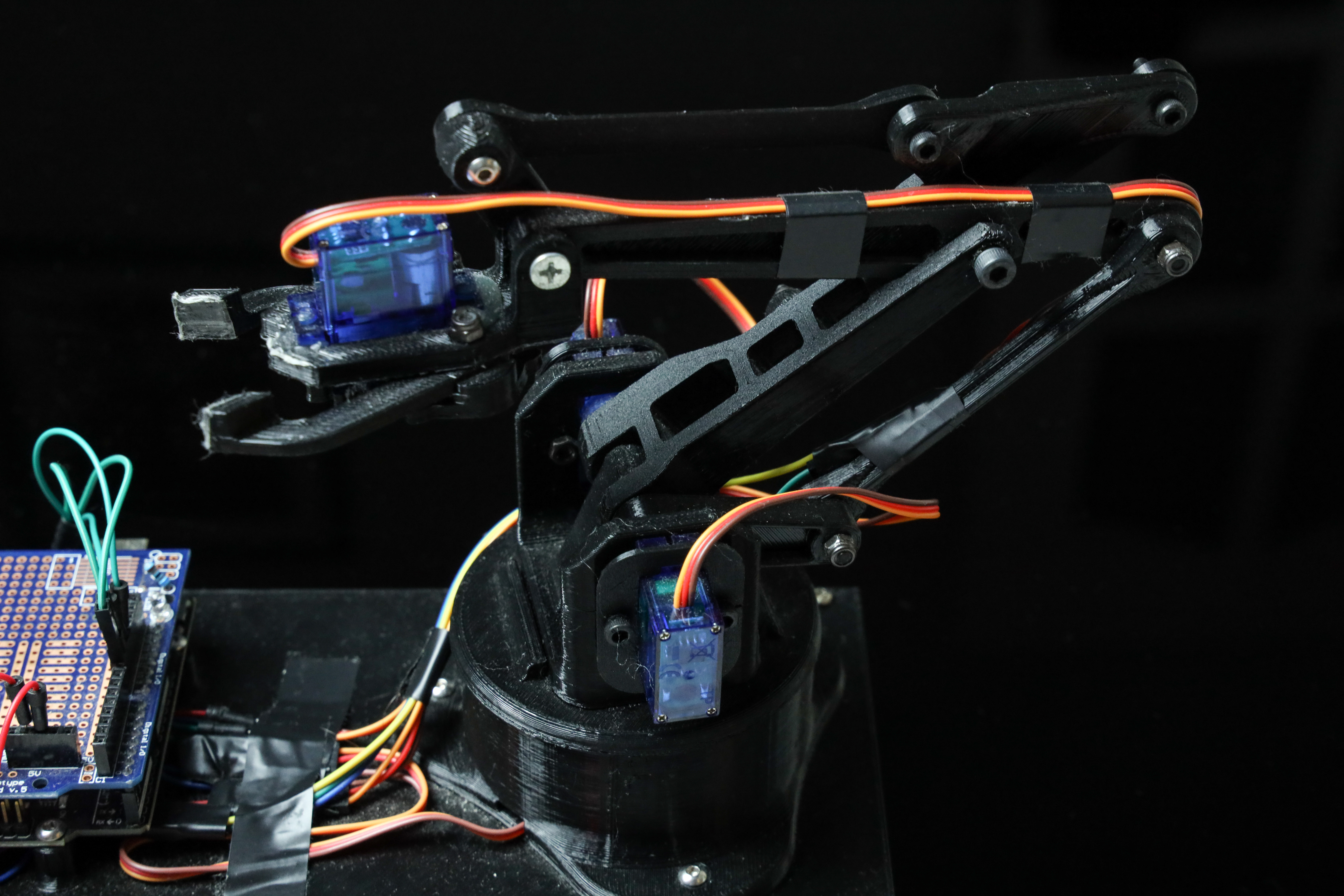
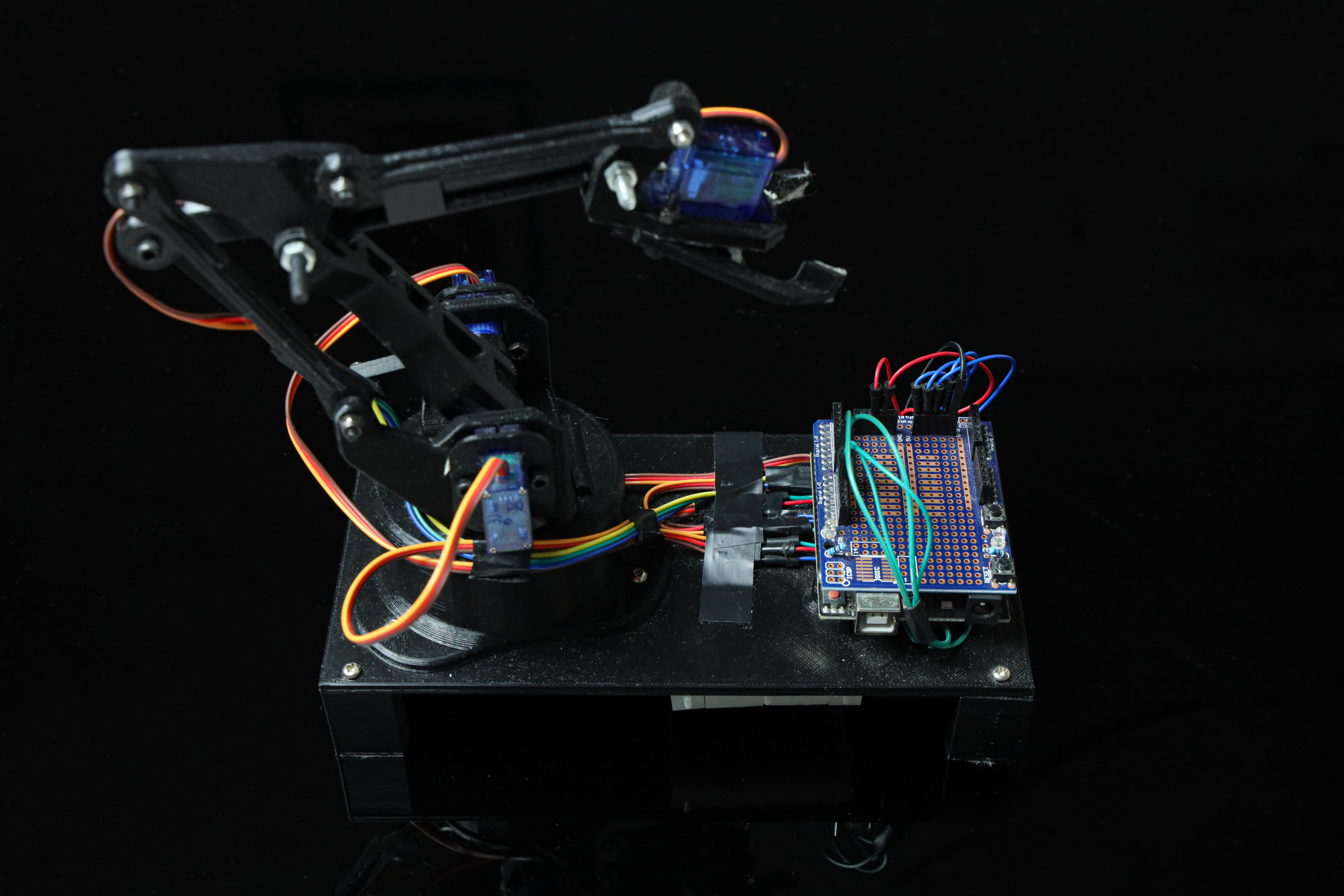
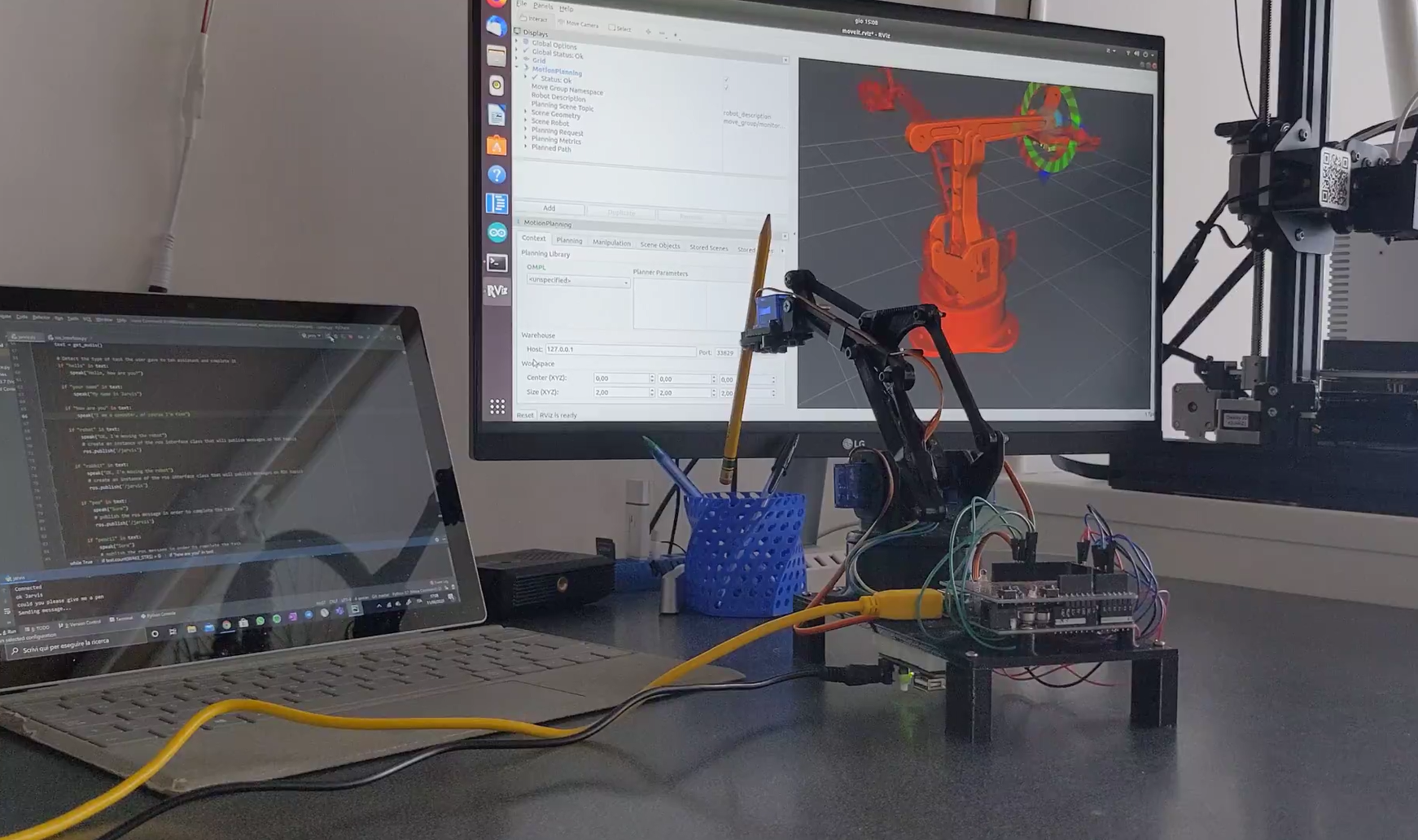
This project aim is to build a 3 axis robot arm with simple and cheap hardware that can be easily and remotely controlled. Despite all the other robot arms built with an Aruidno Uno that are controlled by applying joint angles, this can be controlled assigning X, Y, Z coordinates in the workspace because it implements the inverse kinamatic. Furthermore, it implements a speech recognition module that can run on any computer with a microphone that is connected to the same Wi-Fi network of the robot.
This robot is powered by:
- PC with Ubuntu 20.04 with ROS Noetic
- Arduino UNO
- SG90 Servo Motors (x4)
And is controlled by:
- ROS Noetic
Once it's printed and assembled according and connected, there are few configuration to be made in both Ubuntu 18.04 side and Arduino UNO.
Make sure you install correctly the following required tools before continuing
- Install Ubuntu 20.04 on PC or in Virtual Machine Download the ISO Ubuntu 20.04 for your PC
- Install ROS Noetic on your Ubuntu 20.04
- Install ROS missing libraries. Some libraries that are used in this project are not in the standard ROS package. Install them with:
sudo apt-get install ros-noetic-rosserialsudo apt-get install ros-noetic-rosserial-arduinosudo apt-get install ros-noetic-gazebo-ros-controlsudo apt-get install ros-noetic-moveitsudo apt-get install ros-noetic-actionlib-tools- Install VS Code and Arduino IDE on your PC in order to build and load the Arduino code on the device
- Clone the repo
git clone https://github.com/AntoBrandi/arduinobot.git- If you are using Ubuntu 20.04 with ROS Noetic change the branch to
noetic
cd ~/Arduino-Bot
git checkout noetic- Build the ROS workspace
cd ~/Arduino-Bot/arduinobot_wscatkin_make- Source the project
source devel/setup.bash- Connect the Arduino UNO to your PC and open the Arduino IDE. Open the folder containing the code for the Arduino controller.
To launch the ROS simulated robot
roslaunch arduinobot_bringup sim_complete.launchTo launch the real robot, connect the Arduino to the PC and upload the code in the folder on the Arduino controller. Then launch the real robot
roslaunch arduinobot_bringup complete.launchTo launch the interface with Alexa download ngrok and create an account then setup ngrok with your key
./ngrok authtoken <YOUR-KEY>Then start the ngrok web server with
./ngrok http 5000Copy the link that provides ngrok and paste it in the section Endpoint of your Alexa Developer account
Contributions are what make the open source community such an amazing place to be learn, inspire, and create. Any contributions you make are greatly appreciated.
- Fork the Project
- Create your Feature Branch (
git checkout -b feature/AmazingFeature) - Commit your Changes (
git commit -m 'Add some AmazingFeature') - Push to the Branch (
git push origin feature/AmazingFeature) - Open a Pull Request
Distributed under the MIT License. See LICENSE for more information.
Antonio Brandi - LinkedIn - antonio.brandi@outlook.it
My Projects: https://github.com/AntoBrandi