
Original Udacity Project Repo CarND-LaneLines-P1

When we drive, we use our eyes to decide where to go. The lines on the road that show us where the lanes act as our constant reference for where to steer the vehicle. Naturally, one of the first things we would like to do in developing a self-driving car is to automatically detect lane lines using an algorithm.
In this project, you will detect lane lines in images using Python and OpenCV. OpenCV means "Open-Source Computer Vision", which is a package that has many useful tools for analyzing images.
To meet specifications in the project, take a look at the requirements in the project rubric
For the Final Code and demonstration on how to approach this problem, please refer to P1.ipynd. If you want to view without Jupyter Notebook, here is a markdown version P1.md
Step 1: Set up the CarND Term1 Starter Kit if you haven't already.
Step 2: Open the code in a Jupyter Notebook
You will complete the project code in a Jupyter notebook. If you are unfamiliar with Jupyter Notebooks, check out Cyrille Rossant's Basics of Jupyter Notebook and Python to get started.
Jupyter is an Ipython notebook where you can run blocks of code and see results interactively. All the code for this project is contained in a Jupyter notebook. To start Jupyter in your browser, use terminal to navigate to your project directory and then run the following command at the terminal prompt (be sure you've activated your Python 3 carnd-term1 environment as described in the CarND Term1 Starter Kit installation instructions!):
> jupyter notebook
A browser window will appear showing the contents of the current directory. Click on the file called "P1.ipynb". Another browser window will appear displaying the notebook. Follow the instructions in the notebook to complete the project.
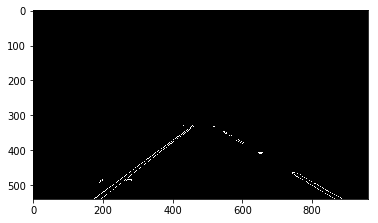
To achieve the final result shown in the first picture, the following image processing procedures are used:
-
Use Opencv function
cv2.cvtColor()to convert RGB image to Grayscale.

-
Use the Grayscale image to perform canny edge detection. This also uses OpenCV function called
cv2.Canny()
-
Apply a mask 😷 to only include the lane line and ignore all other edges
-
Apply Hough Line Transformation from the Canny edge detection. Transfer the edge dots to lines. This uses
cv2.HoughLinesP()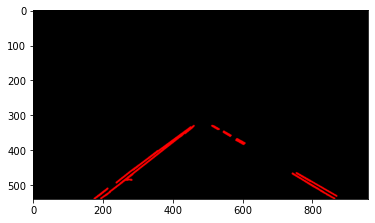

-
Apply the averaging method of your design to extrapolate previous many lines into two coherent lines to represent our lane lines.










Now it ready to apply this logic to process driving videos. To get a stable and not jumping around output, previous frames lines are required. If the current lines have a big difference in location and slopes compare to the previous lines' location, the current line should not be accumulated to the result. Below is an output video showing the only result of hough lines and no accumulated average calculations

The below video showed the lane lines after averaging previous results:

You may use cv2.cvtColor to convert the RGB colour space to HSV or HSL colour space and create a different mask filter for both yellow and white lines as that will help to better detect the lines under different conditions and can be used to implement the challenge video. You may go through this helpful resource that explains the variations in detection when using different colour spaces.
Canny Edge Detection: In this portion of the pipeline, there are two main parameters you can tune: lower threshold and higher threshold. Your parameters here seem reasonable. If you want to play around with some more parameters here, check out this link. The tutorial in the link will describe a common method for choosing a threshold in Canny Edge Detection.
Excellent insights have been pointed out and you are on the right path. It is interesting to point out the need to detect curved lanes.
This research paper goes into how to detect curves and will also help in detecting faded lanes. It uses an extended version of the hough lines algorithm to detect tangents to the curve which can help you detect the curve.