Simulation platform of a Layered Approach for Multi-Agent Path Finding (MAPF).
Layered MAPF is a newly proposed algorithm for solving Multi-Agent Path Finding (MAPF) problems. This algorithm adopts a hybrid cloud-edge-terminal architecture, which consists of one centralized cloud server and multiple decentralized edge servers and terminals (robots). The robots plan their path using a two-level A* algorithm guided by heat maps, improving computing efficiency and avoiding most potential conflicts.
Demo videos can be found following this link: https://www.bilibili.com/video/BV1KG4y1n76b/
-
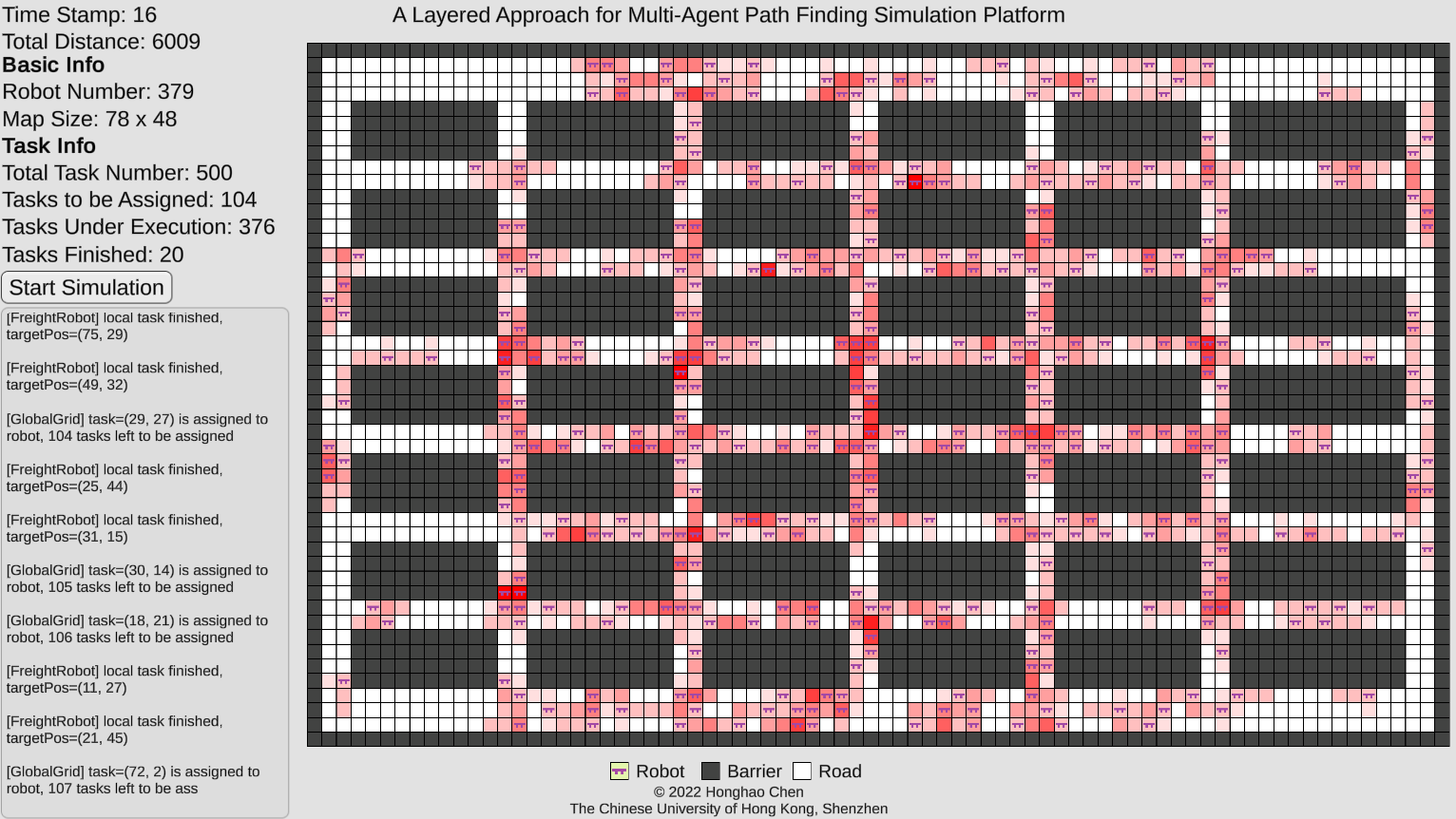
2D Simulation View

-
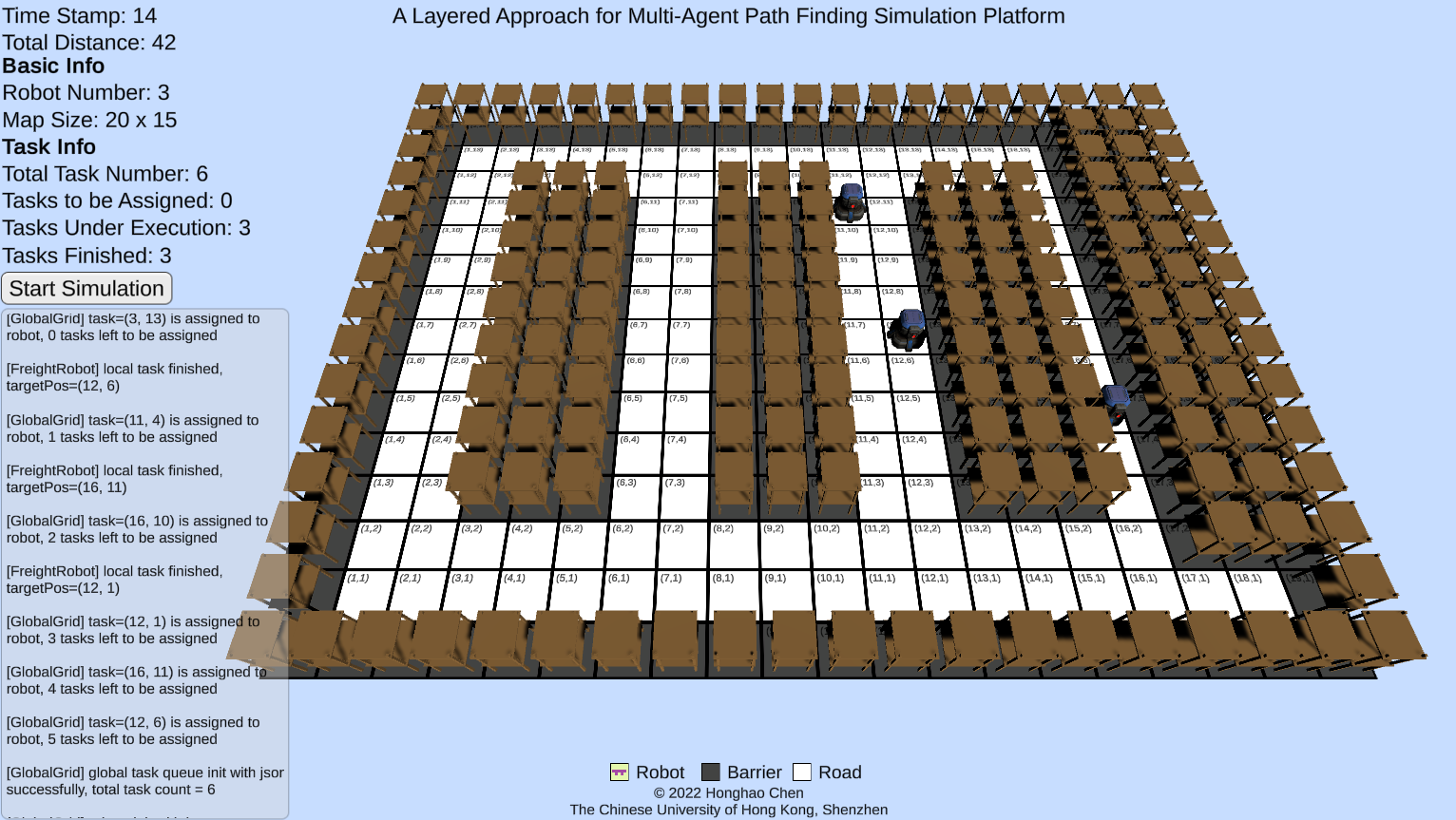
3D Simulation View
-
Heat Map Visualizer
-
Heat Map using T-Shape Generation Algorithm
-
Heat Map using Circle-Gaussian Generation Algorithm

-
-
Map Editor
Edit grid map with MS Excel and save as
csvfiles.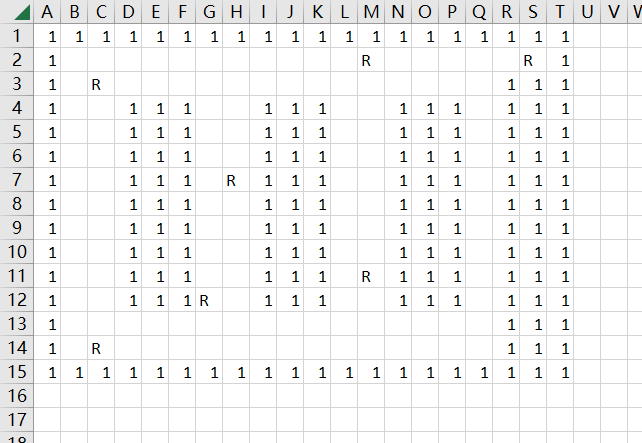
-
Map Converter
Convert
csvmaps (including robot arrangements) tojsonfiles. The simulation program will readjsonfiles at runtime before the simulation begins.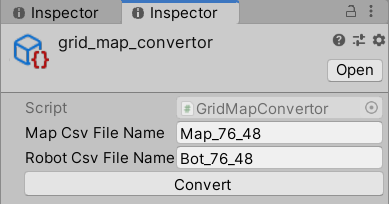
-
Random Task Generator
Generate random tasks given the
jsonmaps and corresponding robot arrangements.







Layered Architecture:

Flow Chart:

Original Map:

Partitioned Map and Topological Map:

Online Scheduling Phase: Two-level A* algorithm guided by heat maps
-
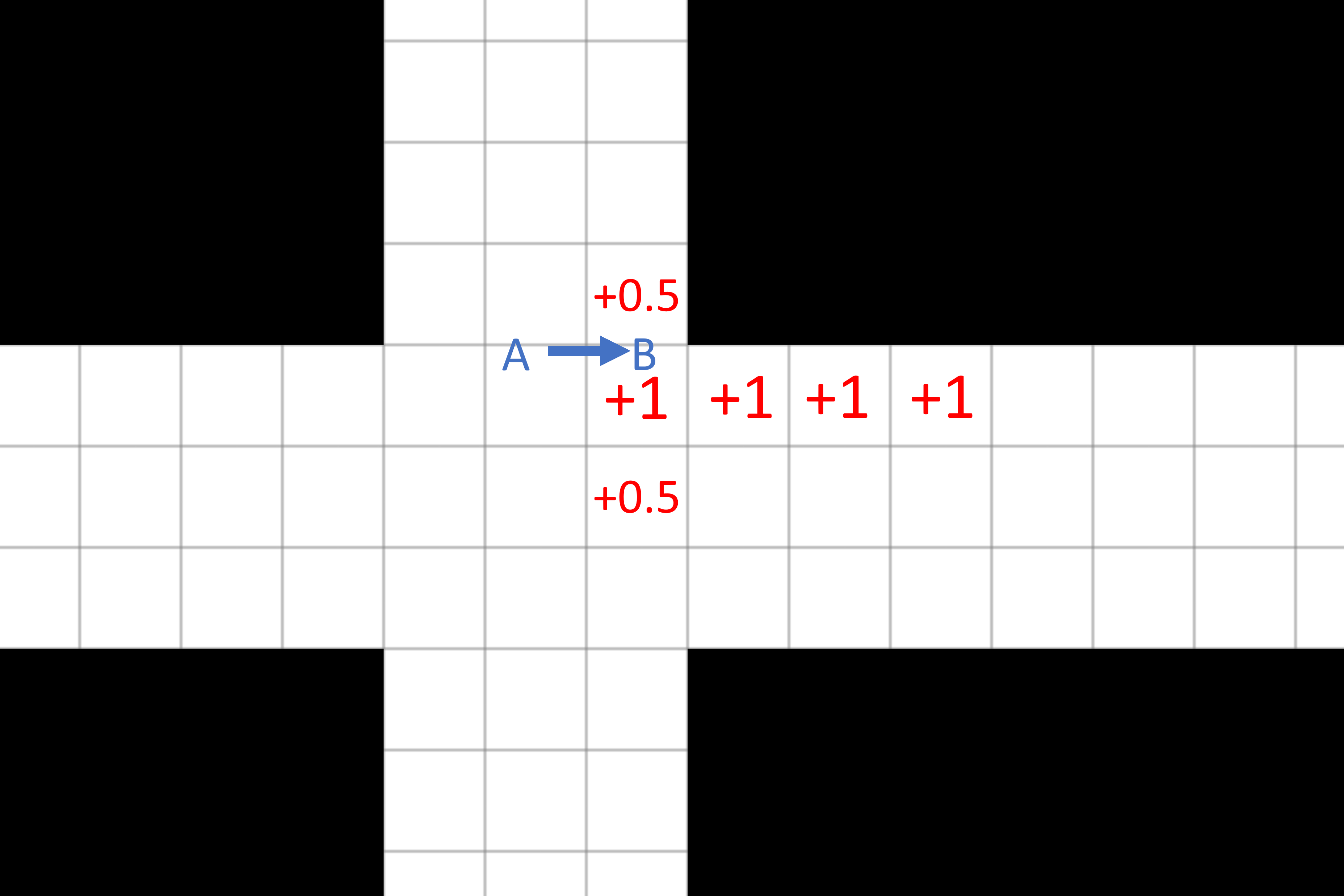
Heat Map Generation (For one single agent):
- T-Shape Generation Algorithm is shown as an example.
-
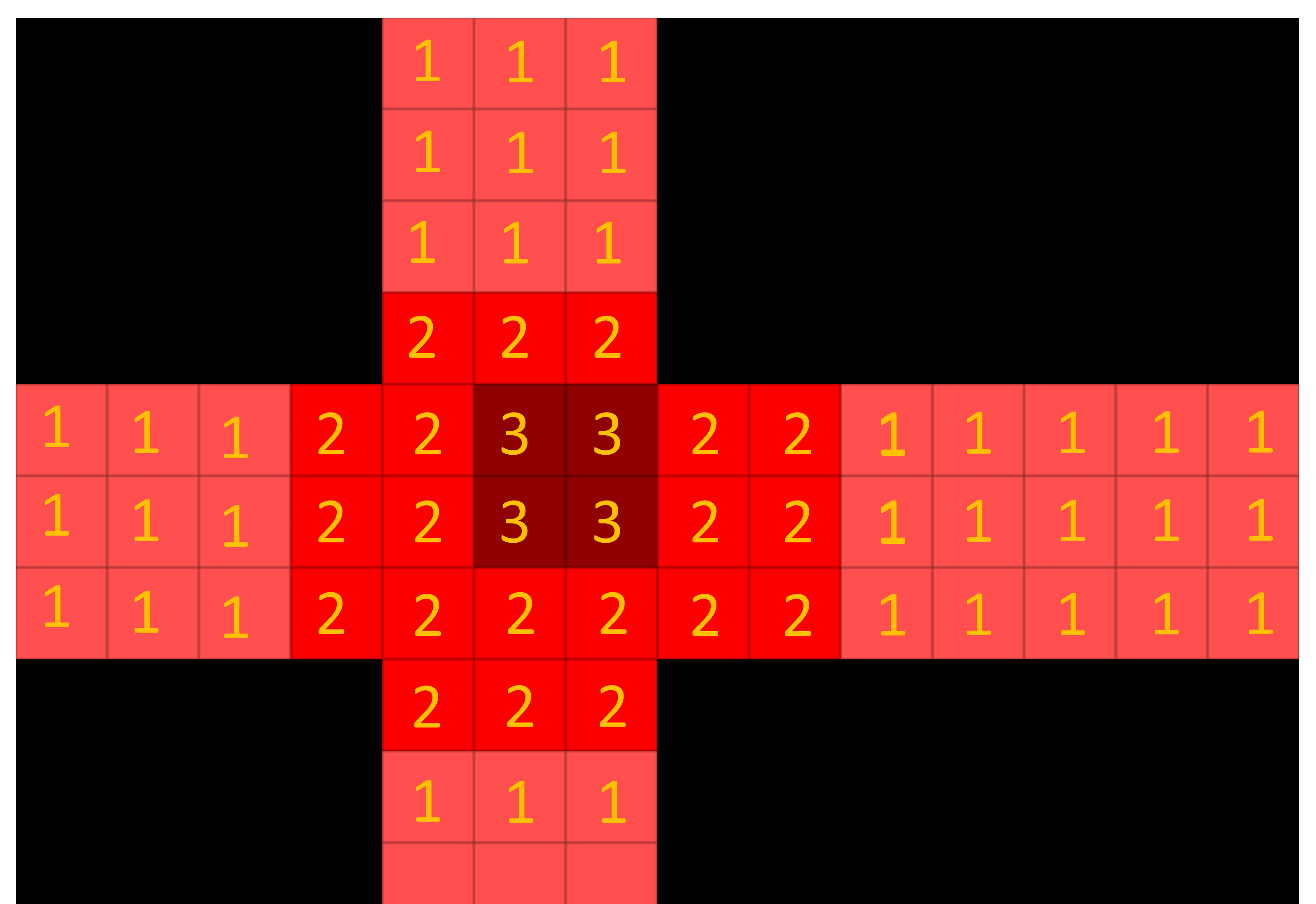
Complete Heat Map (with all agents included):


- Unity 2019.4.5f1
Please check the wiki to see how to use this program.