车辆仪表盘,相机话题消息显示,夹爪控制界面

UR5控制界面

Kinect 3d识别,键盘控制husky,命令行输入


仿真moveit


建图


- 安装qt
apt : sudo apt-get install qtcreator
安装包: http://download.qt.io/archive/qt/5.9/5.9.9/qt-opensource-linux-x64-5.9.9.run
wget http://download.qt.io/archive/qt/5.9/5.9.9/qt-opensource-linux-x64-5.9.9.run
chmod a+x qt-opensource-linux-x64-5.9.9.run
./qt-opensource-linux-x64-5.9.9.run
- 添加qtcreator到环境变量
sudo gedit /usr/bin/qtcreator
内容
#!/bin/sh
export QT_HOME=/home/xxxx/Qtxxx/Tools/QtCreator/bin
$QT_HOME/qtcreator $*sudo chmod a+x /usr/bin/qtcreator
terminal 输入 qtcreater
- 安装依赖:
sudo apt-get install ros-melodic-qt-create
sudo apt-get install ros-melodic-qt-build
- 完成之后就可以通过catkin_create_qt_pkg来创建ros gui包
mkdir -p catkin_qt/src
cd catkin_qt/src/
catkin_create_qt_pkg class1_ros_qt_demo roscpp rviz
编译:catkin_make
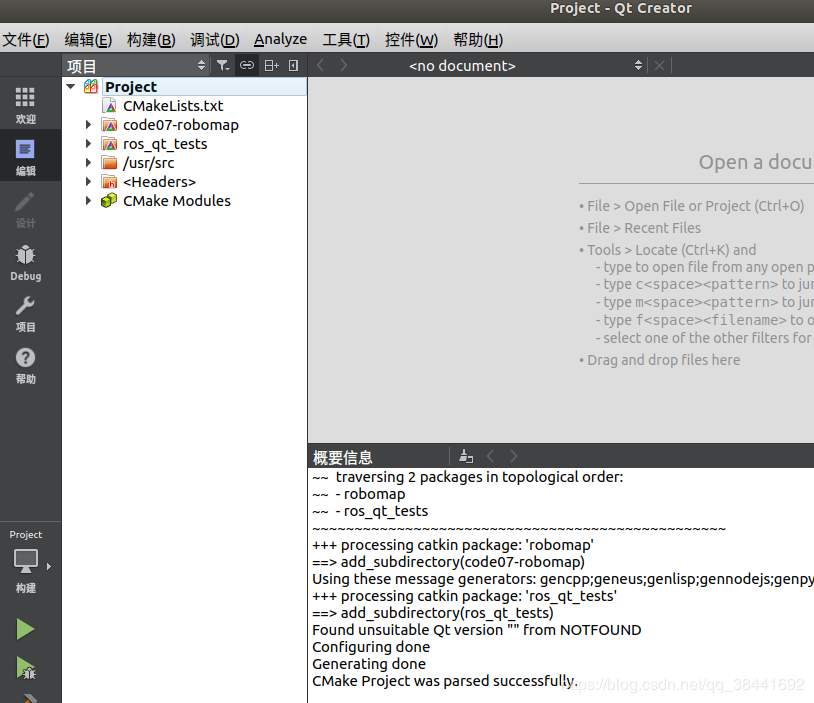
打开项目:
-
文件->打开项目->选择工作空间下的cmakelist.txt(注意并非功能包下的)
-
将build的构建目录改为当前工作空间的build文件夹
可能会发现版本不匹配的错误,如果没有就跳过
将功能包的cmakelist.txt进行更改:
- 更改为如下,注意将class1_ros_qt_demo 更改为自己的功能包名, 如我的class1_ros_qt_demo
##############################################################################
# CMake
##############################################################################
cmake_minimum_required(VERSION 2.8.0)
project(class1_ros_qt_demo)
set(CMAKE_INCLUDE_CURRENT_DIR ON)
##############################################################################
# Catkin
##############################################################################
# qt_build provides the qt cmake glue, roscpp the comms for a default talker
find_package(catkin REQUIRED COMPONENTS rviz roscpp)
find_package(Qt5 REQUIRED Core Widgets)
set(QT_LIBRARIES Qt5::Widgets)
include_directories(${catkin_INCLUDE_DIRS})
# Use this to define what the package will export (e.g. libs, headers).
# Since the default here is to produce only a binary, we don't worry about
# exporting anything.
catkin_package()
##############################################################################
# Qt Environment
##############################################################################
# this comes from qt_build's qt-ros.cmake which is automatically
# included via the dependency call in package.xml
#rosbuild_prepare_qt4(QtCore QtGui) # Add the appropriate components to the component list here
##############################################################################
# Sections
##############################################################################
file(GLOB QT_FORMS RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} ui/*.ui)
file(GLOB QT_RESOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} resources/*.qrc)
file(GLOB_RECURSE QT_MOC RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS include/class1_ros_qt_demo/*.hpp *.h)
QT5_ADD_RESOURCES(QT_RESOURCES_CPP ${QT_RESOURCES})
QT5_WRAP_UI(QT_FORMS_HPP ${QT_FORMS})
QT5_WRAP_CPP(QT_MOC_HPP ${QT_MOC})
##############################################################################
# Sources
##############################################################################
file(GLOB_RECURSE QT_SOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS src/*.cpp)
##############################################################################
# Binaries
##############################################################################
add_executable(class1_ros_qt_demo ${QT_SOURCES} ${QT_RESOURCES_CPP} ${QT_FORMS_HPP} ${QT_MOC_HPP})
target_link_libraries(class1_ros_qt_demo ${QT_LIBRARIES} ${catkin_LIBRARIES})
install(TARGETS class1_ros_qt_demo RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})- package.xml
<?xml version="1.0"?>
<package>
<name>class1_ros_qt_demo</name>
<version>0.1.0</version>
<description>
class1_ros_qt_demo
</description>
<maintainer email="chengyangkj@gmail.com">chengyangkj</maintainer>
<author>chengyangkj</author>
<license>BSD</license>
<!-- <url type="bugtracker">https://github.com/stonier/qt_ros/issues</url> -->
<!-- <url type="repository">https://github.com/stonier/qt_ros</url> -->
<buildtool_depend>catkin</buildtool_depend>
<!--build_depend>qt_build</build_depend-->
<build_depend>roscpp</build_depend>
<!--build_depend>libqt4-dev</build_depend-->
<!--run_depend>qt_build</run_depend-->
<run_depend>roscpp</run_depend>
<!--run_depend>libqt4-dev</run_depend-->
<build_depend>roscpp</build_depend>
<run_depend>roscpp</run_depend>
<build_depend>rospy</build_depend>
<run_depend>rospy</run_depend>
<build_depend>rviz</build_depend>
<run_depend>rviz</run_depend>
<build_depend>qtbase5-dev</build_depend>
<run_depend>libqt5-core</run_depend>
<run_depend>libqt5-gui</run_depend>
<run_depend>libqt5-widgets</run_depend>
</package>保存再次执行cmake, 即可成功
-
更改功能包main_window.hpp
-
由于Q4t中包含QMainWindow在QtGui中,在Qt5中更改为QtWidgets类中,所以需要作更改:
-
./include/功能包名/main_window.hpp
-
修改如下:
#include <QtGui/QMainWindow>
变更为:
#include <QtWidgets/QMainWindow>
-
点击左下角的三角标识符,进行编译运行
[ WARN] [1621071748.717816346]: [image_transport] It looks like you are trying to subscribe directly to a transport-specific image topic '/usb_cam/image_raw/compressed',
in which case you will likely get a connection error. Try subscribing to the base topic '/usb_cam/image_raw' instead with parameter ~image_transport set to 'compressed' (on the command line, _image_transport:=compressed).
See http://ros.org/wiki/image_transportfor details.似乎您正在尝试直接订阅特定于传输的图像主题“ /usb_cam /image_raw /compressed”,在这种情况下,您可能会遇到连接错误。尝试订阅基本主题“ /usb_cam /image_raw”,而将参数〜image_transport设置为“ compressed”(在命令行上,_ image_transport:= compressed) 解決問題了: 需要開啓多線程
void QNode::run() {
ros::AsyncSpinner s(4);//第一種方法
//ros::MultiThreadedSpinner s(2);//multi thread 第二種
s.start();
ros::Rate loop_rate(1);
int count = 0;
while ( ros::ok() ) {
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
if(count<3)
{
chatter_publisher.publish(msg);
log(Info,std::string("I sent: ")+msg.data);
}
ros::spinOnce();
loop_rate.sleep();
++count;
}
std::cout << "Ros shutdown, proceeding to close the gui." << std::endl;
Q_EMIT rosShutdown(); // used to signal the gui for a shutdown (useful to roslaunch)
}參考 沒有ur_msgs依賴,需要下載 https://github.com/ros-industrial/ur_msgs.git 放到驅動功能包裏面
要在Gazebo中调出模拟机器人,请运行:
roslaunch ur_gazebo ur5.launch
MoveIt!使用模拟机器人 再次,您可以使用MoveIt!控制模拟机器人。
用于设置MoveIt!节点允许运动计划运行:
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
使用包含MoveIt的配置启动RViz!运动规划插件运行:
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
注意: 作为MoveIt!似乎很难找到具有完全关节限制的UR的计划[-2pi,2pi],有一个使用限制为[-pi,pi]的关节限制的joint_limited版本。要使用此联合限制版本,只需使用启动文件参数’limited’,即:
roslaunch ur_gazebo ur5.launch limited:=true
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true limited:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true
如果無法加載模型
roscore
rosrun gazebo_ros gazebo
查看模型
roslaunch ur_description view_ur5.launch
roslaunch ur_description view_ur5_with_gripper.launch
运行UR5的Gazebo仿真和moveit+rviz规划
roslaunch ur_gazebo ur5.launch
roslaunch ur_planning ur_sc_planning.launch
运行带有robotiq85夹爪的仿真规划
roslaunch ur_gazebo ur5_with_gripper.launch
roslaunch ur_planning ur_with_gripper_sc_planning.launch
启动
sudo bash
rosrun robotiq_2f_gripper_control Robotiq2FGripperRtuNode.py /dev/ttyUSB0
rosrun robotiq_2f_gripper_control Robotiq2FGripperSimpleController.py
a激活 燈變藍
roslaunch husky_ur_description gazebo_huskyWithUR5.launch
roslaunch husky_ur_bringup ur5_moveit_planning_execution.launch sim:=true
roslaunch husky_ur_bringup moveit_rviz.launch config:=true下面是参考github的项目,可以根据作者的项目进行搭建,源码这部分没有提供。
该软件包的目的是使操纵器的集成更加简单
git clone https://github.com/husky/husky_manipulation.git --recursive
在您的URDF中,确保包含所需的husky_manipulation description。例如,如果您使用单个UR5,请确保在URDF中包括以下行:
<xacro:include filename="$(find husky_ur_description)/urdf/husky_ur5_description.urdf.xacro" />然后,您将需要将URDF导出为机器人的URDF_EXTRA。这会将它“附加”到husky。方便将所有这些添加到单个Shell脚本文件中,以后可以获取该脚本文件。确保来源初始脚本,因为这将确保设置任何其他必要的环境变量
source $(catkin_find husky_ur_description)/scripts/husky_ur5_envar.sh
export HUSKY_URDF_EXTRAS=$(catkin_find your_description_package urdf/your_description.urdf.xacro --first-only)
上面的内容应该使您的husky附有一只或多只手臂。它们将被附加在默认位置。如果需要更改机械臂的安装位置,请在下面导出必要的变量。
HUSKY_LEFT_UR_XYZ
HUSKY_LEFT_UR_RPY
HUSKY_RIGHT_UR_XYZ
HUSKY_RIGHT_UR_RPY
实例 export HUSKY_LEFT_UR_XYZ="-0.3 0.0 0.2"
husky_manipulation软件包已经具有moveit配置设置。该配置对于机器人来说应该是简单易用的的,但是您可能会收到奇怪的碰撞或关于缺少关节的警告。如果您的机器人是自定义的,则可以使用该moveit配置作为您的机器人的起点。
进入工作区中的src文件夹,然后运行以下命令:
rosrun husky_ur_moveit_config customize_moveit.sh <new_package_name>
该命令将在src文件夹中创建一个新的moveit程序包,该程序包应已准备好针对实际平台进行自定义
如果使用custom_husky设置方法(indigo),则在运行设置助手时必须临时更改URDF。从URDF中删除以下指示的两行。一旦设置了MoveIt配置,即可将其重新添加
<xacro:include filename="$(find husky_description)/urdf/husky.urdf.xacro" />
<xacro:husky_robot />
要自定义moveit配置,请运行以下命令: roslaunch <new_package_name> setup_assistant.launch
该命令将打开此窗口

点击 Load File 这会将urdf加载到配置器中。密切注意终端。如果您的配置与默认配置有很大不同,您可能会看到一些警告,但是如果看到很多警告,则可能是某些来源不正确。取消此操作,并确保所有内容均正确来源,然后再次运行。在右侧的3D视图窗口中签入,并确保这是您的机器人的外观。我最近看到3D窗口为空的问题。不确定如何解决此问题。
如果你不需要深度自定义的话,那么可能只需要更改3个标签即可:

-
self-collisions

在此下方,将滑块一直拖动到最右边,然后单击“重新生成默认碰撞矩阵”。根据模型的复杂程度,这可能需要一分钟的时间。完成后,快速浏览一下已自动禁用的冲突。请特别注意由于“默认冲突”而被禁用的冲突。这意味着当关节为零时,它会撞到某些东西。取消选中您希望查看是否发生的任何碰撞
- Robot pose

这些已保存的命名位置可以稍后调用。如果要添加任何预定义的姿势或修改已经存在的存放位置,则可以单击“添加姿势”或“编辑所选内容”并拖动滑块以设置新位置

- Passive Joints 固定关节是MoveIt无需担心的关节。这些就是车轮接头或PTU。在此菜单下,选择不是手臂关节的任何东西,并确保它在正确的列表中
!](https://images.gitee.com/uploads/images/2020/1211/142906_92817039_8042238.png "屏幕截图.png")
或许会遇到警报,但没事

下一步将向您显示向导负责的文件列表。确保除了以下内容外,什么都没有选择:
Config/
Launch/
config/Husky.srdf
如果您修改的内容超出了以上概述的部分,则可能需要编辑其他文件,但这可能会带来其他后果。

选择这些文件后,单击“生成程序包”,然后关闭向导
在实际的机器人上有2个部分需要运行
假设机器人全部启动并且手臂已设置好,那么您应该能够运行
roslaunch husky_ur_bringup husky_ur_bringup.launch
如果工作正常,则应该在RVIZ中看到手臂的正确放置,或者应该在/ joint_states主题上看到UR关节的发布。
MoveIt!是手臂的计划和执行界面。它与驱动程序分开运行。运行MoveIt!,也就是您在上面创建的配置
roslaunch dummy_moveit_config husky_ur_moveit_planning_execution.launch
您应该不会在终端中看到任何错误。现在,您应该能够在RVIZ中添加Moveit MotionPlanning插件并控制机械臂了!